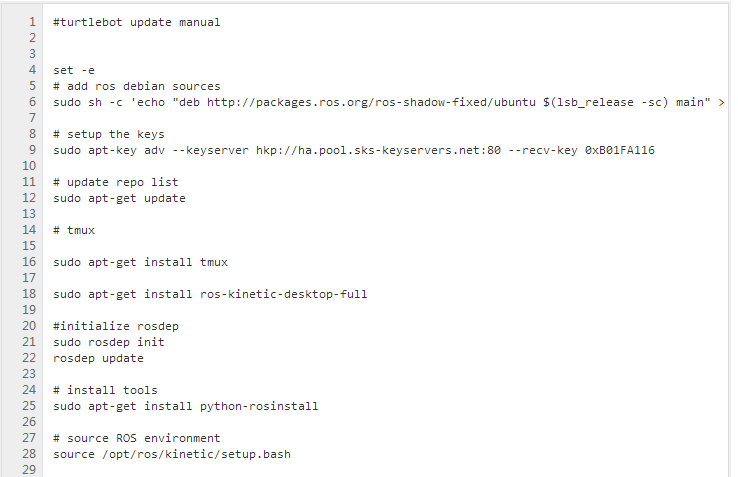
install_ros_410c.sh运行有问题.
"./install_ros_410c.sh:bad interpreter: No such file or directory" :
主要是因为大家从windows系统将install_ros_410c.sh拷到我们的linux系统导致的格式错误!
解决方式:
#sh>vi filename
利用如下命令查看文件格式
:set ff 或 :set fileformat
可以看到如下信息
fileformat=dos 或 fileformat=unix
利用如下命令修改文件格式
:set ff=unix 或 :set fileformat=unix
:wq (存盘退出)
最后再执行文件即可
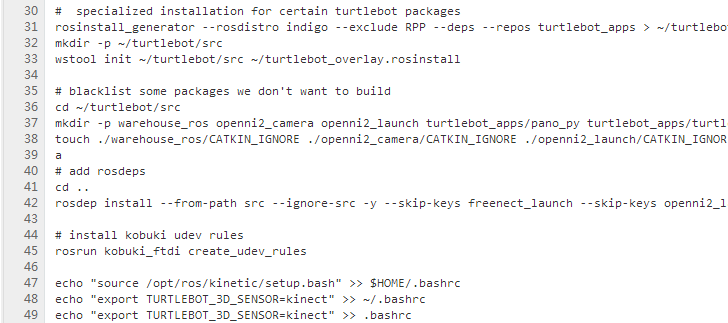
/install_ros_410c.sh:
The following packages have unmet dependencies:
ros-kinetic-audio-capture : Depends: libgstreamer-plugins-good1.0-0 but it is not installable
ros-kinetic-audio-play : Depends: libgstreamer-plugins-good1.0-0 but it is not installable
ros-kinetic-people : Depends: ros-kinetic-leg-detector but it is not installable
Depends: ros-kinetic-people-velocity-tracker but it is not installable
ros-kinetic-sound-play : Depends: libgstreamer-plugins-good1.0-0 but it is not installable
Unable to correct problems, you have held broken packages.
这里是因为ros这几个库官网未更新导致,但不影响我们turtlebot的功能,这里我们可以直接忽略,为了大家以后安装turtlebot更简便快捷,这里我们重新上传新的更新脚本,并命名为:turtlebot_follower.sh



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享


