社区
机器视觉
帖子详情
ros打开launch文件有问题
felicx温水煮青蛙
2017-11-12 11:41:05
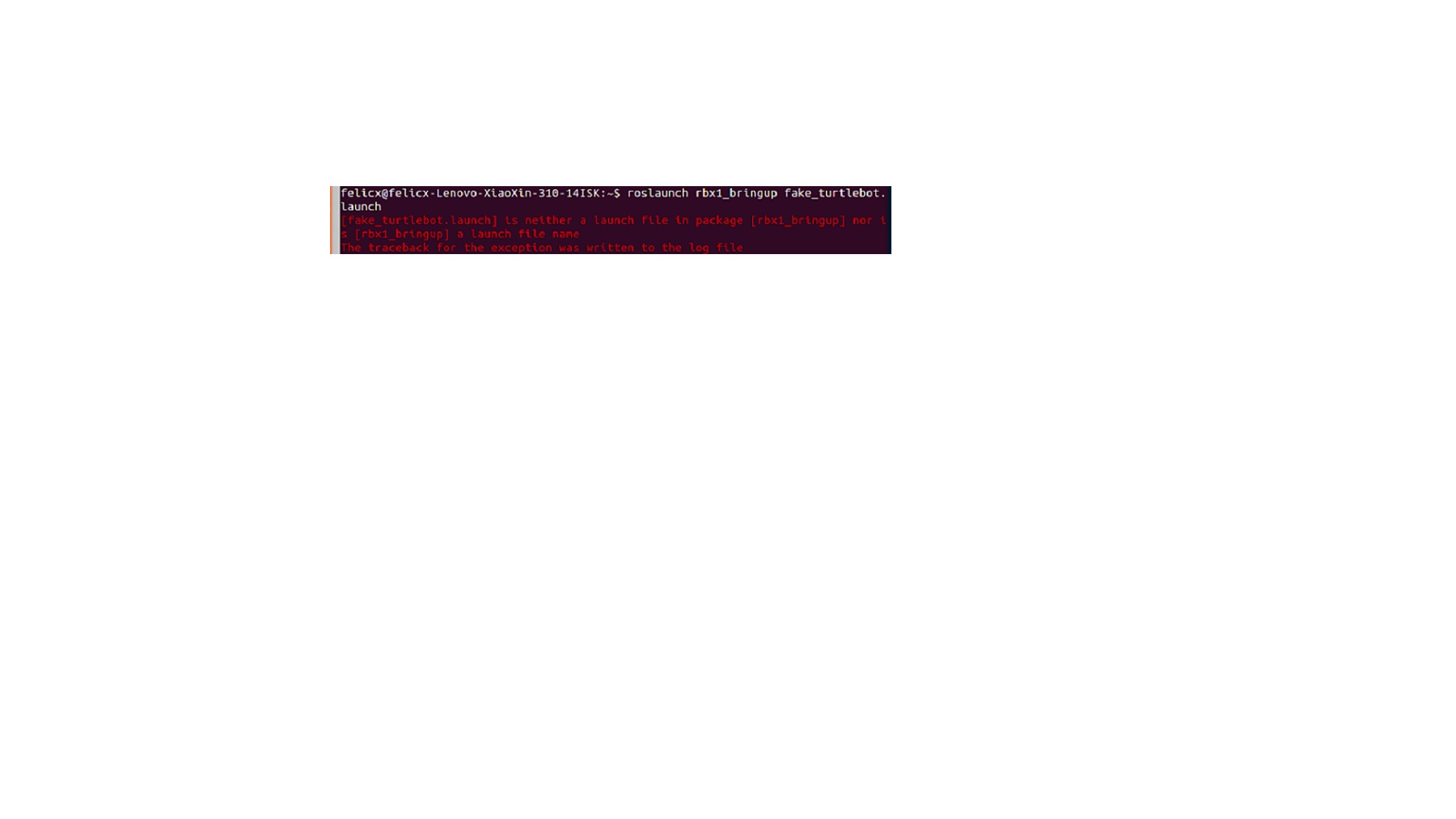
最近用ros打开launch文件一直报错(如图)
已经在bashrc里面添加了要source的空间了,却还是要每次都source
...全文
849
2
打赏
收藏
ros打开launch文件有问题
最近用ros打开launch文件一直报错(如图) 已经在bashrc里面添加了要source的空间了,却还是要每次都source
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
felicx温水煮青蛙
2017-11-18
打赏
举报
回复
楼主稳。。。
felicx温水煮青蛙
2017-11-18
打赏
举报
回复
这应该是系统的问题,我第二天重启后就自己OK了! 个人觉得如果实在不行的话,就重装ROS,反正重装也不费多少时间。
ROS
2
launch
文件
使用Node进行节点启动时,需要设置的参数的来历
很多人认为使用
ROS
在...在这里,第一要说明的是在
ROS
中使用
launch
文件
启动节点,不只有使用
launch
_
ros
.action.node.Node这一种方式,这个
问题
在国内讲解
ROS
使用的相关资料都未有提及,这个
问题
留在下一次再详细说明。
五分钟带你速通
ROS
2的
launch
文件
摘要:
ROS
2的
launch
文件
用于批量启动多个节点,简化复杂系统的部署。支持Python、XML和YAML格式,其中Python格式最灵活。创建步骤包括:1) 在功能包下建立
launch
文件
夹;2) 编写
launch
文件
定义节点;3) 配置...
ROS
launch
启动
文件
ROS
启动
文件
launch
学习
ROS
2
launch
介绍
在大多数入门教程中,运行的每个新节点
打开
新的终端。...
launch
文件
允许同时启动和配置许多包含
ROS
2节点的可执行
文件
。使用
ros
2
launch
命令运行单个
launch
文件
将立即启动整个系统所有节点及其配置。
ROS
:
launch
启动
文件
的使用方法
ROS
:
launch
启动
文件
的使用方法
机器视觉
4,502
社区成员
15,367
社区内容
发帖
与我相关
我的任务
机器视觉
图形图像/机器视觉
复制链接
扫一扫
分享
社区描述
图形图像/机器视觉
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享


