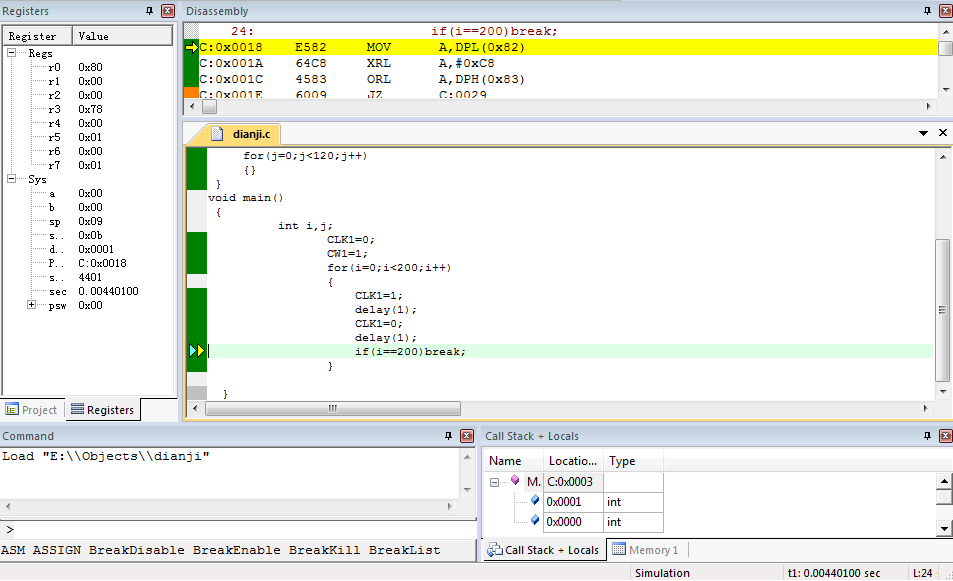
在for循环里面i到不了200,在到200的时候for循环的条件不满足,不进入循环了,所以break语句执行不到。
69,380
社区成员
243,074
社区内容
加载中
试试用AI创作助手写篇文章吧


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享






