社区
嵌入开发(WinCE)
帖子详情
mavlink协议解析
是晓雨呀
2018-11-21 01:41:33
新手求助大佬 看个程序 看懂的大佬 加微信私聊发红包
...全文
1514
6
打赏
收藏
mavlink协议解析
新手求助大佬 看个程序 看懂的大佬 加微信私聊发红包
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
6 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
whgyxq
2019-03-01
打赏
举报
回复
谢谢。非常有用。
是晓雨呀
2018-12-16
打赏
举报
回复
引用 3 楼 maplele20 的回复:
[quote=引用 2 楼 qq_41806211 的回复:] 谢谢谢谢谢谢谢谢
可以结贴了不
[/quote]可以的
gooogleman
2018-11-30
打赏
举报
回复
看上去也不复杂啊,看来可以搞搞飞控去。
maplele20
2018-11-23
打赏
举报
回复
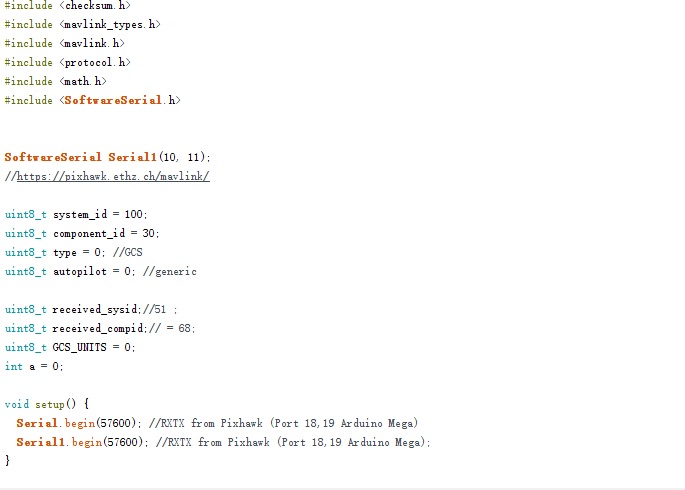
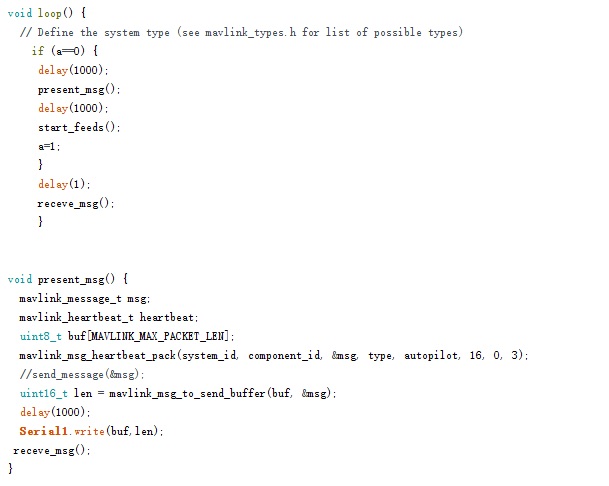
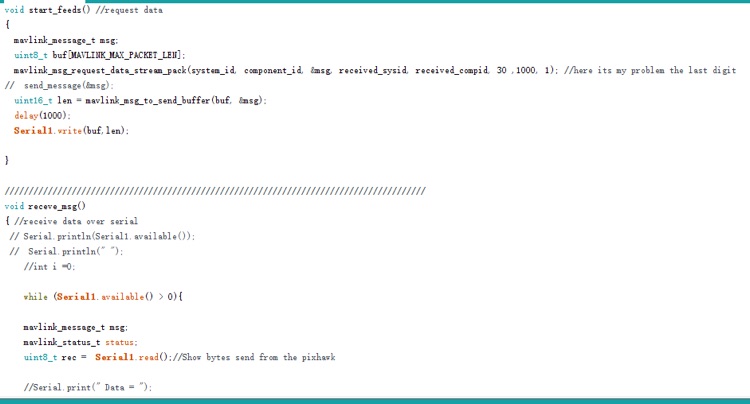
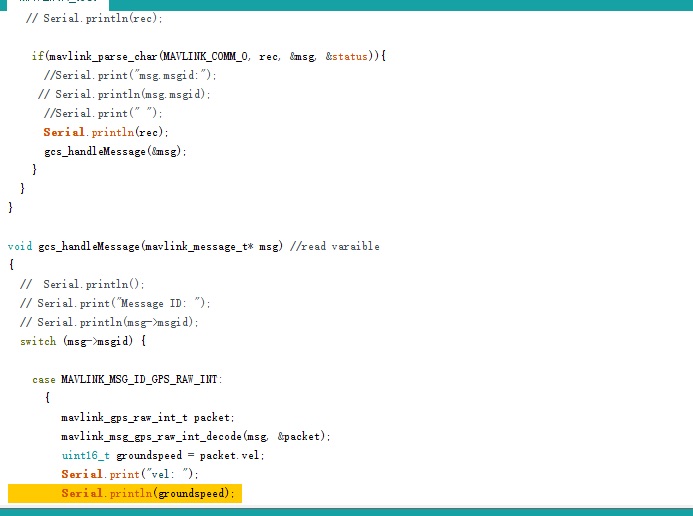
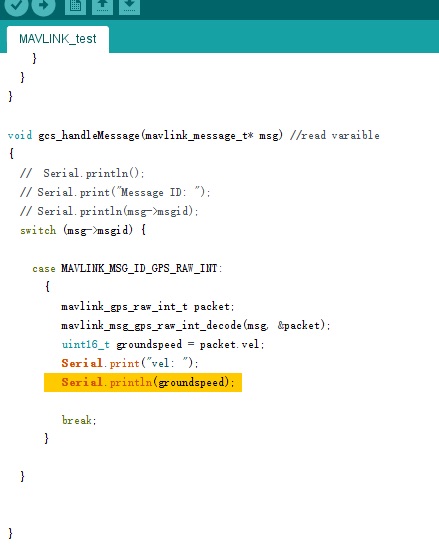
该段代码的基本流程如下: 1. 判断a是否为0,a为0则进入步骤2,否则进入步骤6 2. 等待1s,通过serial1发送心跳包,然后等待1s,通过serial接收mavlink数据包,进入步骤3 3. 如果从serial1接收到mavlink数据包,则进入步骤4,否则进入步骤5 4. 如果得到一个完整的mavlink数据包,并且该包类型是MAVLINK_MSG_ID_GPS_RAW_INT类型,则通过serial输出groundspeed(即对地速度),否则进入步骤5 5. 等待1s,通过serial1发送request data的mavlink包 6. 等待1s,进入步骤3
maplele20
2018-11-23
打赏
举报
回复
引用 2 楼 qq_41806211 的回复:
谢谢谢谢谢谢谢谢
可以结贴了不
是晓雨呀
2018-11-23
打赏
举报
回复
谢谢谢谢谢谢谢谢
Mavlink
协议
硬
解析
主要代码
本文聚焦于
MAVLink
协议
的硬
解析
,主要探讨
MAVLINK
_MESSAGE_INFO 结构体的定义,该定义可在
mavlink
v1.0commoncommon.h 文件中找到。
java实现
mavlink
协议
解析
与封包上传数据,实现
mavlink
数据交互,附带代码、详解
本文介绍了使用Java实现
Mavlink
协议
解析
与封包上传数据,实现数据交互。
Mavlink
是无人飞行器常用通讯
协议
,文中说明了源码使用方法,包括引入SDK、
解析
数据包、判断消息类型等,还介绍了封包并发送数据的过程,附带代码详解。
MAVLink
协议
数据包
解析
实战教程
本文详细讲解了
MAVLink
协议
数据包的结构,包括头部信息、消息ID和CRC校验码的
解析
与验证。涵盖了数据包的基本组成、各字段的作用、消息ID的识别与分类、系统组件ID的功能,以及如何通过现有库进行高效
解析
。文章旨在帮助开发者掌握
MAVLink
协议
的实际应用。
嵌入开发(WinCE)
19,523
社区成员
41,565
社区内容
发帖
与我相关
我的任务
嵌入开发(WinCE)
硬件/嵌入开发 嵌入开发(WinCE)
复制链接
扫一扫
分享
社区描述
硬件/嵌入开发 嵌入开发(WinCE)
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

 [/quote]可以的
[/quote]可以的

