社区
机器视觉
帖子详情
求教:halcon读取3D点云数据并显示3D图的方法
m0_49583649
2021-04-20 10:39:10
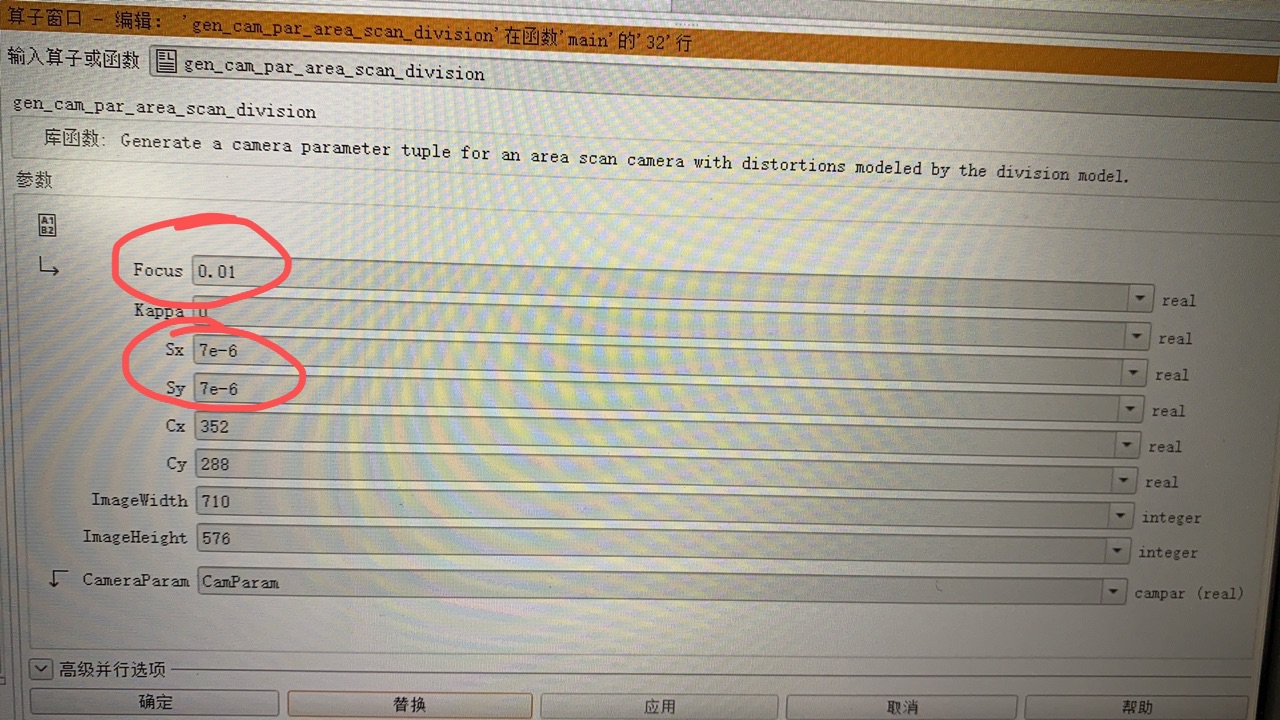
我想用halcon读取3D点云数据并显示3D图,使用的是visualize_object_model_3d的算子,但是该算子里面需要输入相机内参(焦距,像元大小等),我使用的是LMI的线激光来获取点云数据,这些相机参数LMI那边都是保密,请教这样的情况下怎么操作?或者halcon有其他算子可以使用?
...全文
2752
2
打赏
收藏
求教:halcon读取3D点云数据并显示3D图的方法
我想用halcon读取3D点云数据并显示3D图,使用的是visualize_object_model_3d的算子,但是该算子里面需要输入相机内参(焦距,像元大小等),我使用的是LMI的线激光来获取点云数据,这些相机参数LMI那边都是保密,请教这样的情况下怎么操作?或者halcon有其他算子可以使用?
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
看到这句话,说明你也是一号多卖的受害者
2024-03-07
打赏
举报
回复
Focus可以自己设定,其他的根据相机的规格填写,可以看看帮助手册
m0_60952911
2022-06-07
打赏
举报
回复
兄弟你后来弄出来了吗?我也是这算子,显示就报错
源代码--
3D
点云
视觉--
Halcon
读取
点云
并且
显示
3D
模型.zip
基于
halcon
视觉库开发的
3D
点云
数据
读取
,并实时
显示
3D
点云
模型,提供了开发的所有源代码,包括
读取
点云
数据
的源代码
QT/C++ 调用
halcon
显示
点云
-
Halcon
3D
.zip
此
方法
解决了
halcon
点云
显示
在QT/c++下
显示
拖动卡顿等问题
深度
图
和
3D
点云
相互转化.rar
1. 如何将灰度
图
转为
3D
点云
2. 创建一张深度
图
3. 深度
图
转
点云
、
点云
转深度
图
博客地址:https://blog.csdn.net/weixin_38566632/article/details/118092691?spm=1001.2014.3001.5502
探索
3D
视觉新境界:
Halcon
3D
点云
处理实战指南
探索
3D
视觉新境界:
Halcon
3D
点云
处理实战指南 去发现同类优质开源项目:https://gitcode.com/ 项目介绍 在当今的工业自动化和机器人视觉领域,
3D
点云
数据
处理已成为不可或缺的技术。为了帮助开发者更好地掌握这一技术,我们推出了《[
3D
&
Halcon
]
3D
重要算子及简单处理
点云
模型求高度示例讲解》这一开源项目。该项目通过详尽的教程,深入浅出地介绍了
Halcon
中处理...
Halcon
|
读取
3D
相机
点云
数据
Halcon
|
读取
3D
相机
点云
数据
最近发现很多小伙伴在使用
Halcon
处理
3D
工业相机扫描结果的时候遇到了“如何
读取
”的问题。一般的
3D
工业相机储存
数据
的格式有txt格式、tif格式、ply格式、ptx格式、bin格式、obj格式等。 txt格式
读取
.txt文件生成
3D
模型一般需要分析.txt文件的储存格式,下
图
是我使用的工业相机储存的部分txt
数据
: 经过分析,前3列为X、Y、Z坐标,第4...
机器视觉
4,509
社区成员
15,351
社区内容
发帖
与我相关
我的任务
机器视觉
图形图像/机器视觉
复制链接
扫一扫
分享
社区描述
图形图像/机器视觉
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享