260
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享随着整车信号的增多,尤其是周期很短的信号越来越多。CAN的负载已经满足不了需要。经常会有从CAN更新到CANFD的需求。下面说一说从CAN到CANFD 大概需要做哪些事情。
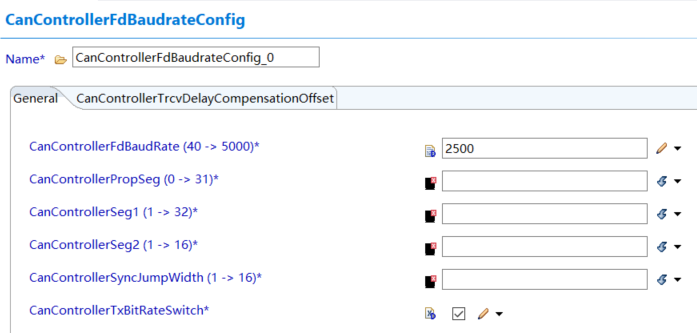
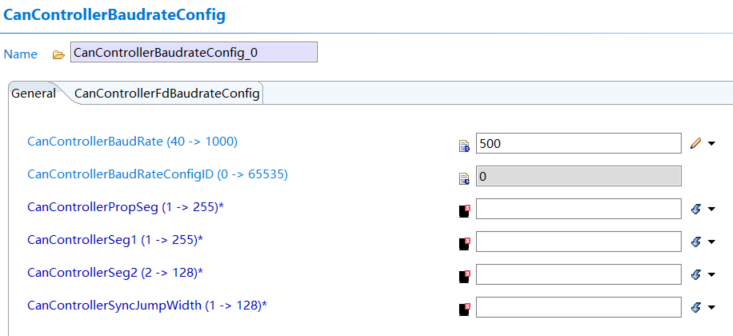
Mcal
CAN 和 CANFD 用的是同一个,在Mcal层面只有波特率的不同。Mcal只需要更新CanControllerFdBaudrateConfig
CanIf
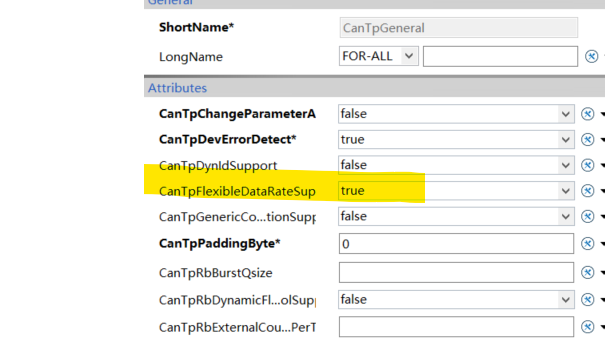
CanIf需要把PduCfg CanIdType 设置成CANFD
CanTp
如信号data部分有大于64bytes. 则CanTp 需要相应的配置