


958
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享非常感谢大神们开源这套系统。晚辈有几个问题想请教大神们:
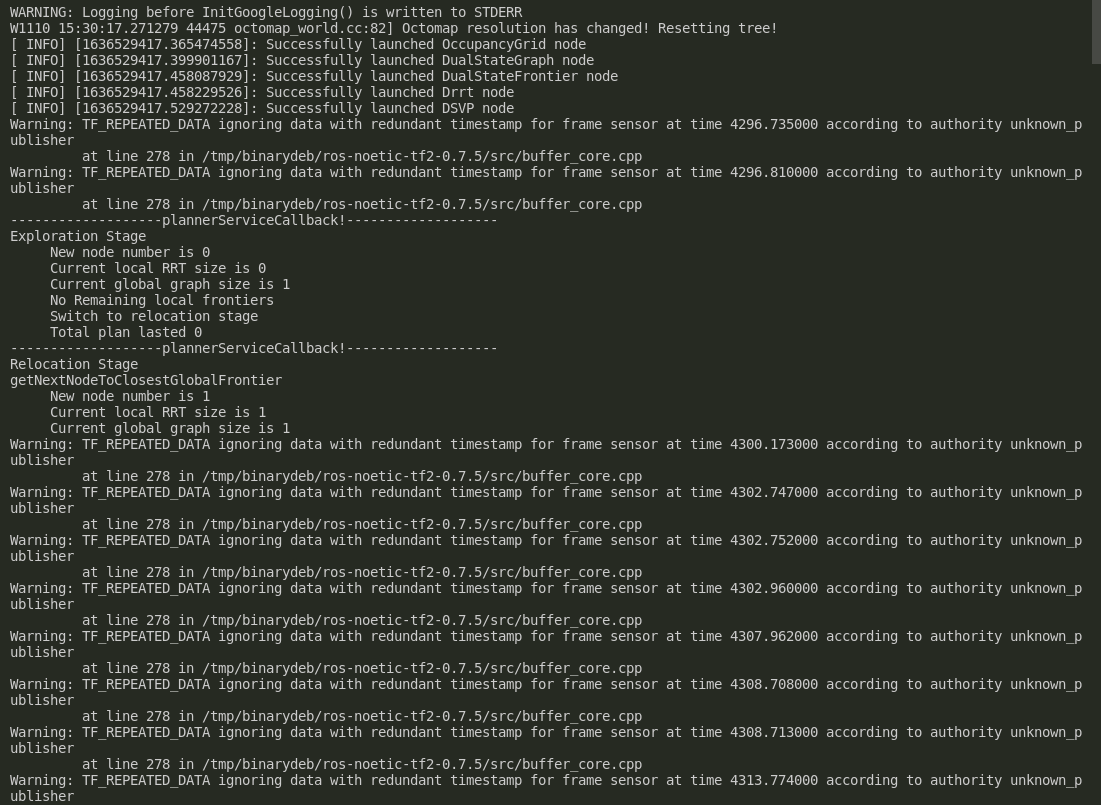
问题一:我在使用Matterport3D仿真环境的时候,出现机器人只在起点向前走了几步后,就无法继续探索问题。然后输出日志显示“Exploration completed, returning home”。(Matterport3D环境编号:17DRP5sb8fy)
这个是当时的日志信息。同时,我想问一下Warning信息是否影响系统的运行?
问题二:
explore_matterport.launch 文件的navigationBoundary的结点,是通过“boundary.ply”文件直接获取边界的点云信息吗?是否由于我没有启动该结点,导致问题一的出现?如果要启动该结点,这个boundary.ply文件如何获取?
<group if="$(arg use_boundary)">
<node pkg="dsvp_launch" type="navigationBoundary" name="navigationBoundary" output="screen" required="true">
<param name="boundary_file_dir" type="string" value="$(find dsvp_launch)/data/boundary.ply" />
<param name="sendBoundary" type="bool" value="true" />
<param name="sendBoundaryInterval" type="int" value="2" />
</node>
</group>

问题1 : 看起来是rrt没有扩展出去,可以在drrt.cpp的plannerIterate函数里加log,找一下问题
问题2:boundary.ply文件应该是一个导航边界框,由navigationBoundary.cpp来读取,然后以/navigation_boundary话题发布出去,launch文件里use_boundary为false,好像默认不会启动该节点

