社区
TARE机器人自主导航系统
问答区
帖子详情
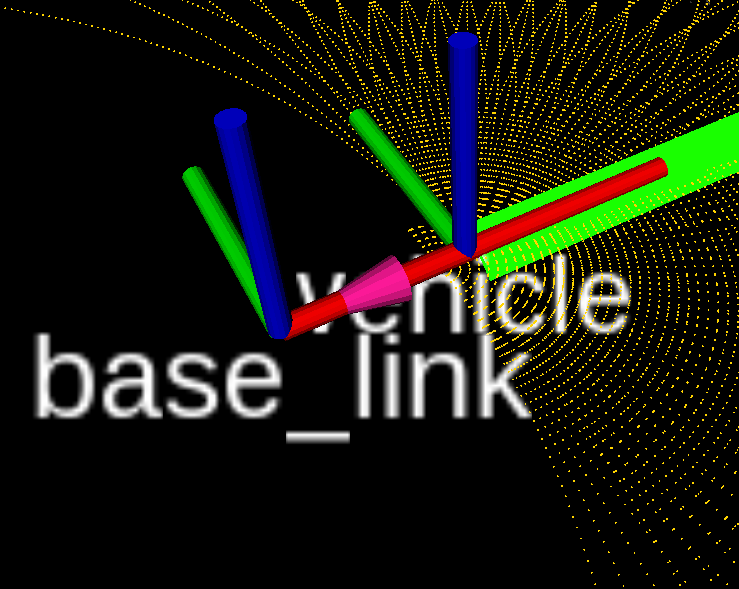
发布目标点往反方向运动
Bless3
2021-12-13 20:32:18
base_link与vehicle坐标系也对应了呀
...全文
345
2
打赏
收藏
发布目标点往反方向运动
base_link与vehicle坐标系也对应了呀
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
Jabber_Jagger
2022-01-20
打赏
举报
回复
是不是激光雷达装反了,确认一下安装正方向
哈工大-朱洪彪
社区管理员
2021-12-16
打赏
举报
回复
你好,能录一个完整的视频吗,包含waypoint,这几个link还有freepath和rviz里车运动的视频,现在给出的信息有些少,我们不太好判断
从起点到
目标
点:自动驾驶车道级路线规划教程
自动驾驶车道级路线规划摘要 自动驾驶路线规划的核心是将道路网络建模为有向图,其中节点代表车道片段,边表示车道间的通行关系。规划过程分为三层:路线(车道级导航)、路径(几何曲线)和轨迹(加入时间速度)。路线规划基于静态高精地图,将道路抽象为车道片段集合,通过中心线计算车道长度和
方向
,并建立车道间的拓扑关系(后继、前驱、可换道等)。从OSM地图生成车道图时,需将经纬度转换为局部坐标,解析车道边界并生成中心线。最终路线搜索在该图上进行,考虑交通规则和换道约束,输出允许通行的车道序列而非具体轨迹。动态环境因素由下游
C++实现工业机器人抓取系统:从视觉定位到
运动
规划全流程解析
机器人抓取是工业自动化与智能仓储领域的核心技术,其核心原理在于通过感知、决策与执行的闭环,赋予机械臂自主识别与操作物体的能力。从技术价值看,一个稳定高效的抓取系统能显著提升生产柔性,实现“机器换人”。在应用场景上,它广泛用于物流分拣、装配线和柔性制造。本文聚焦于一个基于C++的工业级实现,其核心模块融合了点云处理与
运动
规划。具体而言,系统利用点云分割进行
目标
定位,结合PnP与ICP算法进行鲁棒的姿态估计,并通过集成MoveIt!等框架完成无碰撞路径规划,最终实现从视觉感知到物理抓取的全链路工程实践。
技术分享 | 基于人工势场法的无人机,机间避撞实现
对于无人机集群飞行除了它的控制方式,轨迹规划、避障等方面的考虑之外,还要考虑无人机集群机间的避撞问题,使得编队既能保持队形又能实现稳定飞行,那么要避免无人机与无人机之间的碰撞,要通过什么样的方式来实现呢?动动脑袋,小小思考一下哦! 下面来看看我们针对解决无人机机间避撞问题所使用的方法吧! 在本次仿真中,我们采用了人工势场法来实现无人机与无人机之间的碰撞。下面将对人工势场法做一个简单介绍。 人工势场法简称APF是Artifical Potential Field的首字母缩写,它的基本思想是,将机器人所在周围环
大疆口袋相机美颜怎么设置_大疆口袋灵眸相机真的值得买吗?2周深度体验测评!...
前段时间欧阳娜娜的vlog深受大家喜爱,不少童鞋表示跃跃欲试但,不知从何下手... 本期《小北的奇妙体验馆》要替各位体验的,正是一款江湖传说中的“vlog神器”!据说有了它,即使是vlog新人,也能毫无负担地记录生活。没错,它就是大疆前不久刚
发布
的灵眸OSMO口袋云台相机 经过我和攻摄各位小伙伴两周的体验把玩,有些使用感受赶紧来聊聊 口袋相机确实很“口袋”先来说说我第一眼看到它的感受,只有一个字 ...
优化器详解
由于之前
发布
的只是简单的说明了优化器的基本作用和用法,并没有对其原理进行深究,本着对其深入理解的想法,因此特意对优化器的原理以及各种优化器机制进行详细介绍。
TARE机器人自主导航系统
1,150
社区成员
453
社区内容
发帖
与我相关
我的任务
TARE机器人自主导航系统
社区内分享我们的开源平台tare机器人自主导航系统,希望能帮助所有自主移动机器人领域的研究人员快速搭建出属于自己的,稳定可靠的机器人仿真和实验的平台,更快进入自己的研究领域
复制链接
扫一扫
分享
社区描述
社区内分享我们的开源平台tare机器人自主导航系统,希望能帮助所有自主移动机器人领域的研究人员快速搭建出属于自己的,稳定可靠的机器人仿真和实验的平台,更快进入自己的研究领域
自动驾驶
人工智能
企业社区
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

