

1,150
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享各位大佬好!目前测试探索建图时出现了以下两种现象:
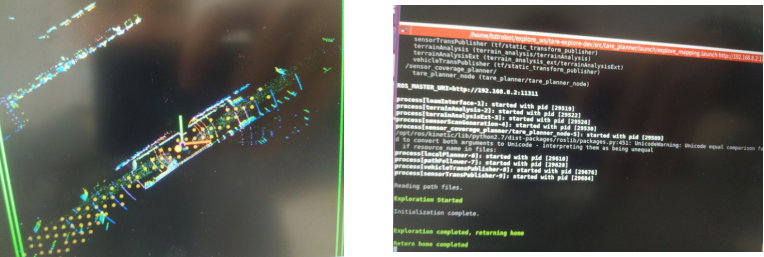
现象一:
机器附近0.5m左右有障碍物的情况下启动探索建图,会出现Exploration completed,return home提示, 机器一直在原地不动。

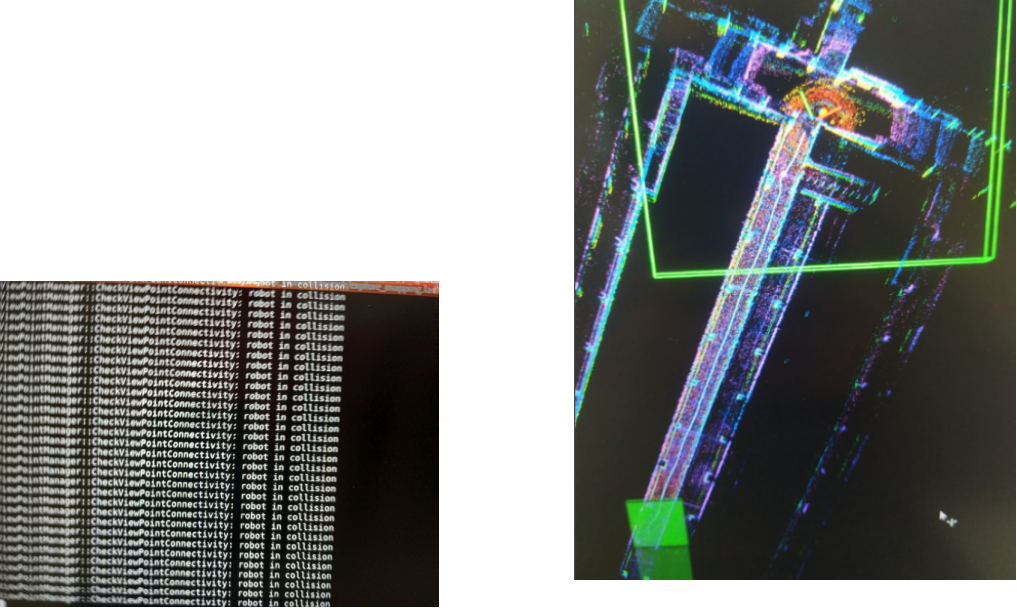
现象二:
探索过程中有人从机器旁边走过,之后提示: robot in collision,机器停止探索,并会尝试go home。
有大佬遇到这两种情况吗?

你好,对于1,可以试下用针对小环境的launch file,比如explore_matterport.launch。如果还不行的话可以调小机器人的碰撞半径(https://github.com/caochao39/tare_planner/blob/d9c539d289721ba429c10e692c44cf20e0452c31/src/tare_planner/config/matterport.yaml#L81%EF%BC%89%EF%BC%8C%E7%9B%B8%E5%BA%94%E7%9A%84%E7%82%B9%E4%BA%91%E5%88%86%E8%BE%A8%E7%8E%87%E4%B9%9F%E9%9C%80%E8%A6%81%E7%9B%B8%E5%BA%94%E6%94%B9%E5%8F%98%EF%BC%88https://github.com/caochao39/tare_planner/blob/d9c539d289721ba429c10e692c44cf20e0452c31/src/tare_planner/config/matterport.yaml#L48)

