


1,150
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享开发环境:ubuntu18.04 ros melodic
按照步骤在不同终端分别分别运行:
source devel/setup.sh
roslaunch vehicle_simulator system_indoor.launch
source devel/setup.sh
roslaunch far_planner far_planner.launch
能够正常rviz,但是设置goalpoint时无反应,即不开始explore,小车停留在原地无反应。
之后尝试运行tare
能够通过tare生成waypoint,但是只能通过FAR内自己用鼠标控制运动控件来使小车根据tare算法生成的局部路径运动。
同时观察到运行far planner的终端有报错,不知道是否相关。
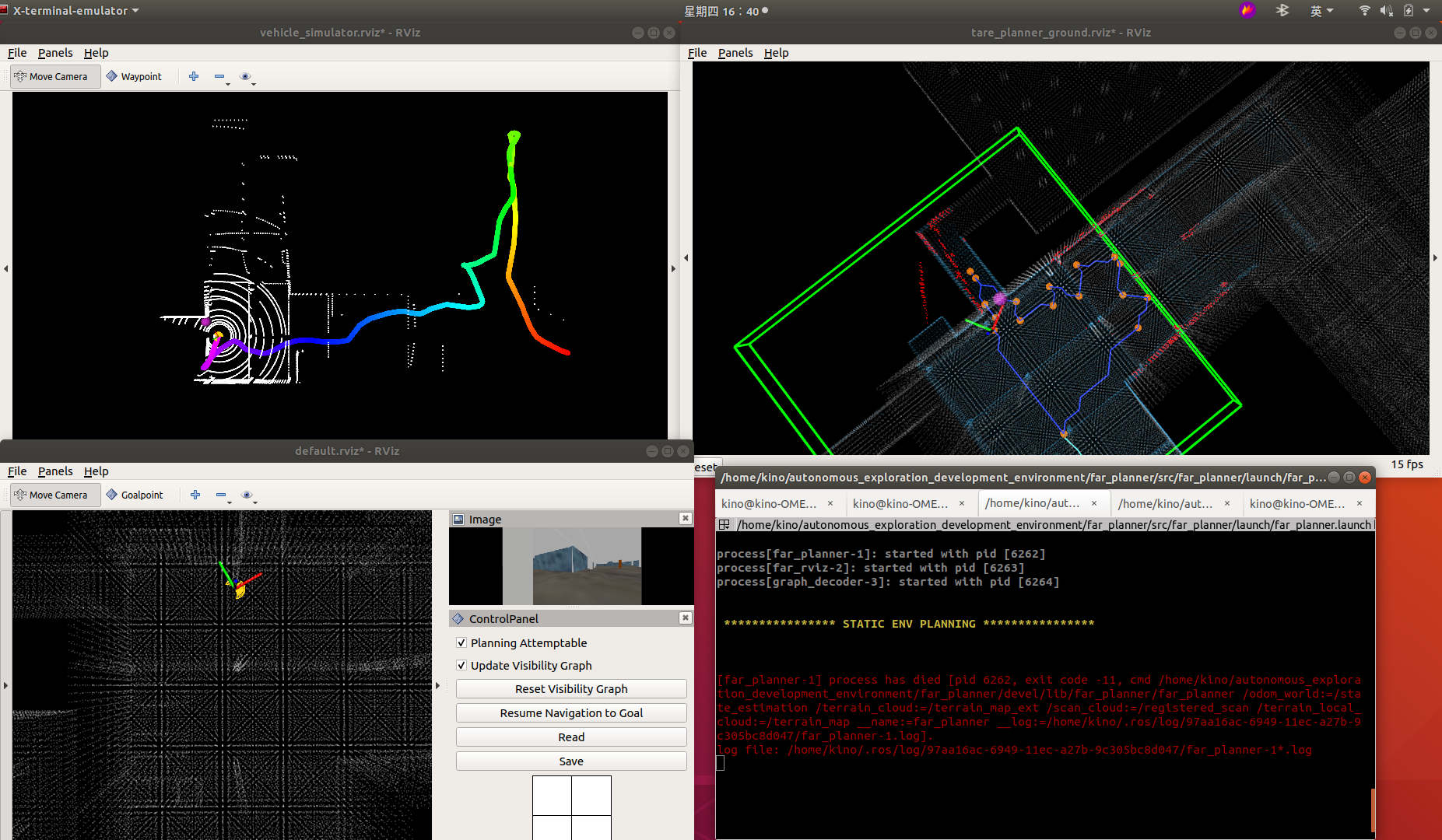
不知道各位有没有遇到类似的问题,请各位不吝赐教。

你好,感谢你的使用,请问你这里使用的FAR Planner代码是在哪一个commit? 能否打开参数中is_debug_output来查看一下报错?根据你的截图FAR Planner运行报错并没有成功执行。
你好,你可以试一下只启动roslaunch vehicle_simulator system_indoor.launch,然后用rviz上的waypoint插件单独发送waypoint,看看车是否运动。如果车运动,你再运行tare看看能否自行探索。如果你同时启动tare和far而且发布了goal point的话,两者输出的waypoint可能会互相冲突。
至于far planner无法执行goal point以及出错的问题,你可以按照上述方式一步一步尝试,先只运行vehicle simulator看看是否能动,然后运行far planner,并且发布goal point,把运行之后的far planner的rviz截图以及终端截图贴进来,我们根据具体的信息才能够给出判断。


你好,你可以试一下只启动roslaunch vehicle_simulator system_indoor.launch,然后用rviz上的waypoint插件单独发送waypoint,看看车是否运动。如果车运动,你再运行tare看看能否自行探索。如果你同时启动tare和far而且发布了goal point的话,两者输出的waypoint可能会互相冲突。
至于far planner无法执行goal point以及出错的问题,你可以按照上述方式一步一步尝试,先只运行vehicle simulator看看是否能动,然后运行far planner,并且发布goal point,把运行之后的far planner的rviz截图以及终端截图贴进来,我们根据具体的信息才能够给出判断。
