


1,147
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享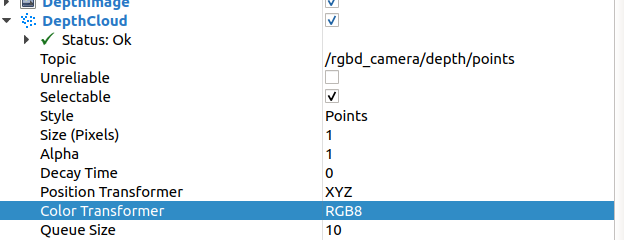




大神你好,我之前提过这个问题但是评论下面不能粘图片了所以新开了一个,可以看到rviz内是带有color信息的,rviz内生成的点云我也看过,和图像内的基本保持一致,所以我试着利用fromrosmsg提取出对应的信息,但是可以发现点云的rgb是有乱码的,请问这是什么情况呢?
我查看了代码内关于相机模型的那部分介绍,但是和点云相关的只有rgbd_camera.urdf.xacro内的<pointCloudTopicName>/rgbd_camera/depth/points</pointCloudTopicName>这一行,更多的信息可能要去仿真环境内部寻找答案,但是最近查阅资料也没有找到相关信息,麻烦大神解读一下,感谢。

你好,pcl::fromROSMsg是一个template 函数,可以试一下pcl::fromROSMsg<pcl::PointXYZRGB>(...), 具体可以参考http://docs.ros.org/en/hydro/api/pcl_conversions/html/namespacepcl.html#af662c7d46db4cf6f7cfdc2aaf4439760
