

1,150
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享如图所示:在我自己的仿真环境中,机器人小车会概率性发生悬空,且local planner卡死的情况,此时车子似乎丧失了移动能力,我能确保却是发布了waypoint这个topic

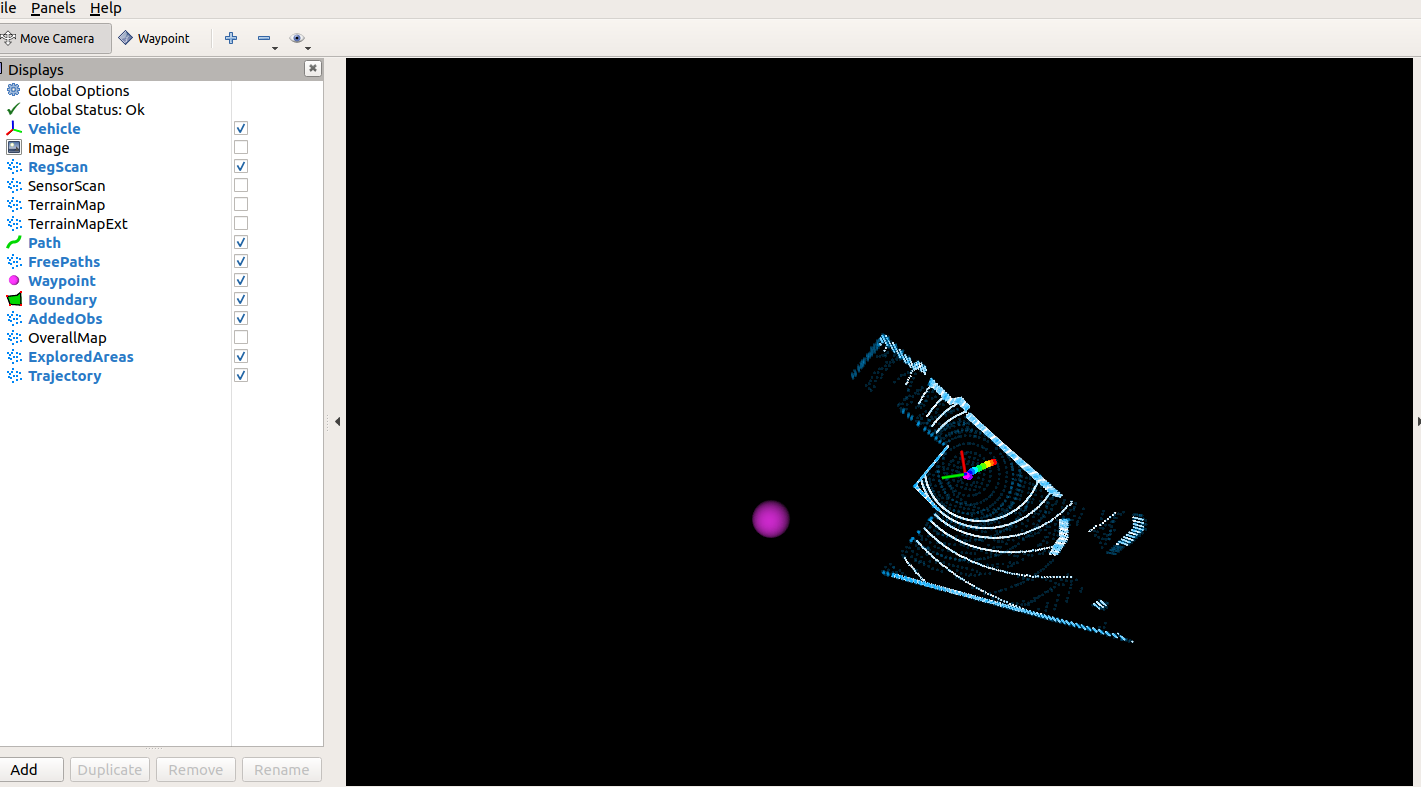

这个问题 在我后面多次更改模型之后,我发现他的主要问题在于 terrainmap 会把雷达周围的一部分区域识别为障碍物,我也不知道具体的原因出在哪?即使我把机器人外壳都去掉了,terrainmap依然会出现 雷达自身周围识别为障碍物。
你好,我看了你发布的视频,包含的信息有限,没有rviz里的地图之类的信息,不太好精确的判断出问题是什么。不过根据我们的经验,如果开始加载进来的时候车就飘在空中,那有可能是激光雷达没有看到真实地面的信息,导致高度判断有误差。我们提供的vehicle_simulator会结合terrain_map的信息中的地面判断车当前的高度,所以一定程度会收到周围地图的影响。针对这种情况有两种解决方式,第一是你可以用gazebo里的ground_truth插件(具体名称可能是odometry,你可以搜一下)来提供车的位置,不过这样做可能需要对vehicle_simulator做较多改动,第二种方式就是只用ground_truth提供的高度信息替换掉我们原来的高度信息,这样其他的都不需要改动。如果你只是想做一些简单的测试,也可以不做任何改动把车在环境绕一圈,高度应该是可以自动的调整回来。
https://note.youdao.com/s/DpIisdgc
好的,这个问题也是概率性出现的,我录制了一个小视频,我不明白车子为什么会出现悬空这种情况,导致着整个都卡死了
你好,你能重复一下这个现象然后录一段视频吗,视频里显示的内容包含你上面这张截图里的内容,同时把轨迹也显示出来最好,这样我们能更好定位问题。上面这张图terrain_map看着还挺正常,但是free_paths是因为遮挡少了一半吗,如果录制视频最好是能让车动起来录制更好判断一些。
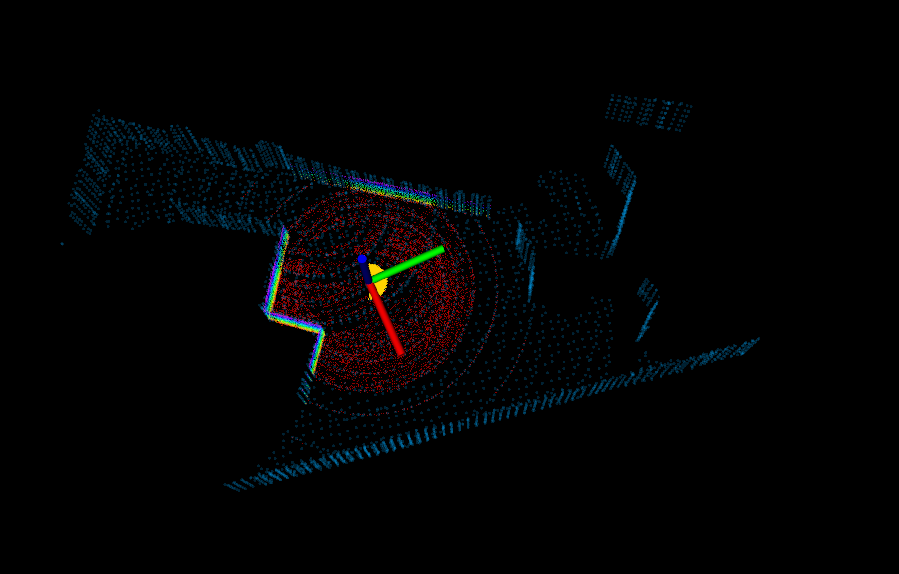

车的姿态有问题啊,状态估计模块的输出正常吗?看看terrain map是不是周围都红了?
