

1,147
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享你好,尝试了一下将far planner部署到小车上,传感器是32线雷达,建图算法用的是lio-sam,启动autonomous_exploration_development_environment的算法,运行farplanner.launch,waypoint可以正常使用,但farplanner的rviz界面里一片黑,没有点云图,goalpoint也无法使用,右边的运动控件可以使用。请问中间是缺了什么步骤吗?具体如何操作才能把FAR Planner部署到车上呢?谢谢!
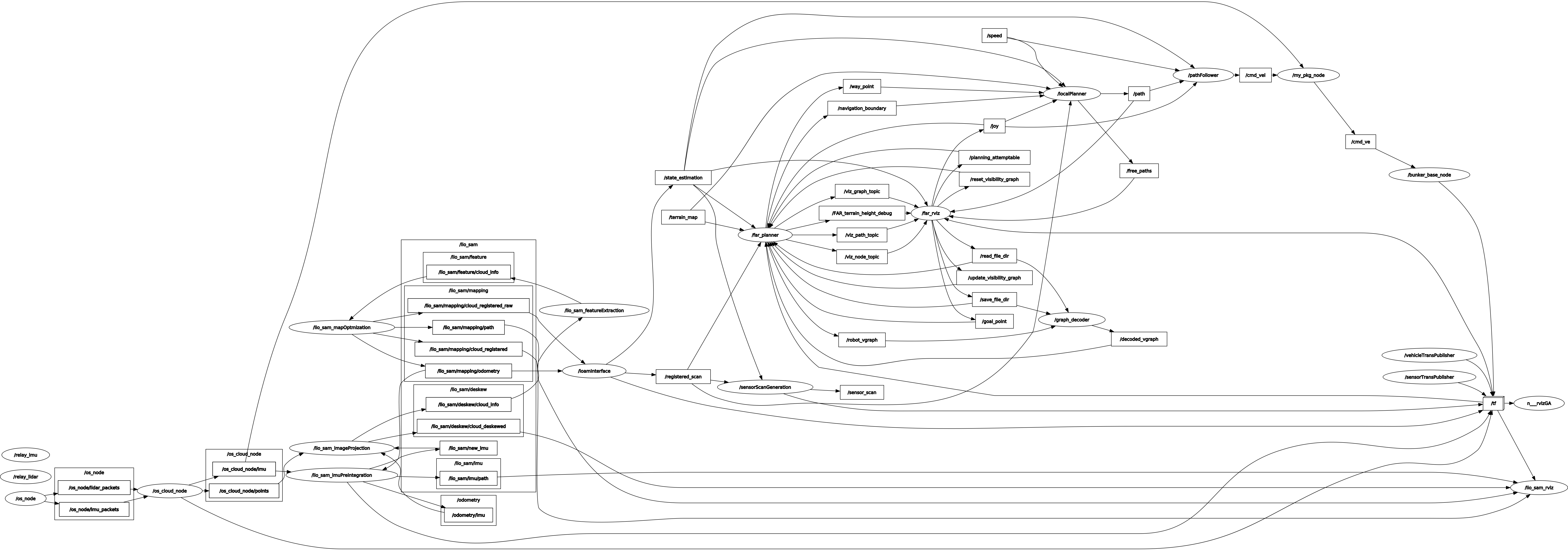
rqt_graph放下面链接了:https://s2.loli.net/2022/01/19/4RqWvV9wZeFJyKU.png
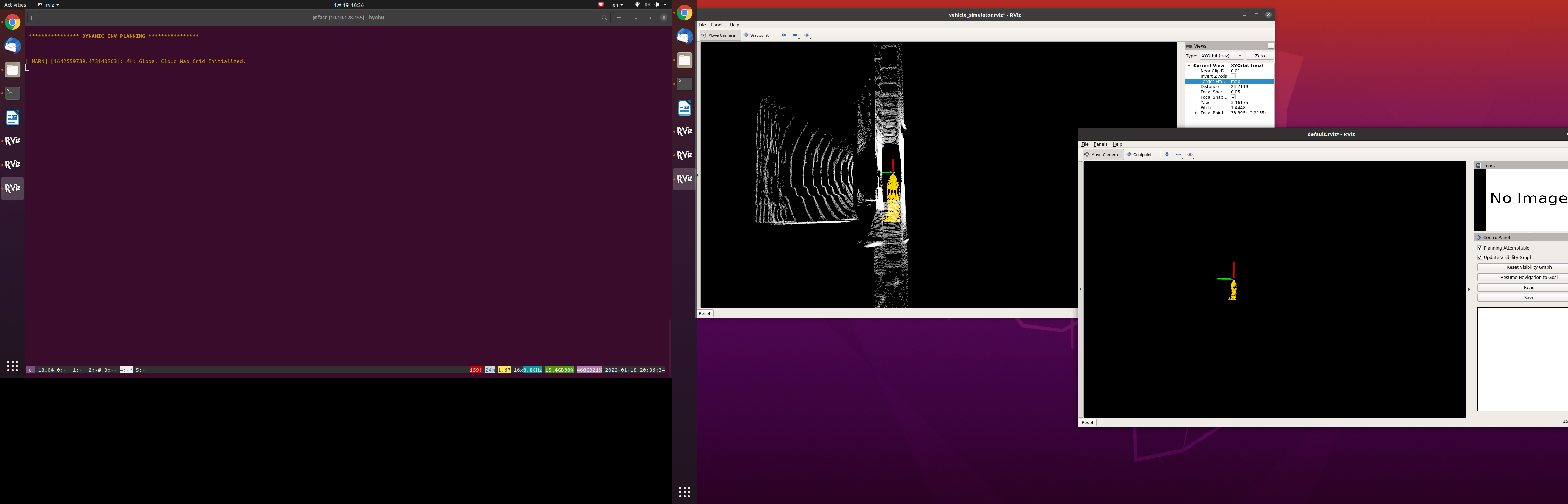
打开is_debug_output后,跑了一个雷达数据bag,terminal界面和rviz界面链接:https://s2.loli.net/2022/01/19/a8eEbC1kzFBgTcm.png

你好,这篇贴子里是放了你的rqt_graph截图吗,我这里点进来之后看不到截图,能不能再上传一次呢?
同问。rviz里面坐标是跟着激光雷达动的,但没有点云显示

{kind=link}
{kind=link}