



1,090
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享您好,我正在使用前轮阿克曼转向的底盘测试local planner,根据您之前关于一些相关参数的解答,我设置了dirThre(我的小车底盘的最大内轮转向角度为33°)和dirToVehicle
<param name="dirThre" type="double" value="30.0" />
<param name="dirToVehicle" type="bool" value="true" />
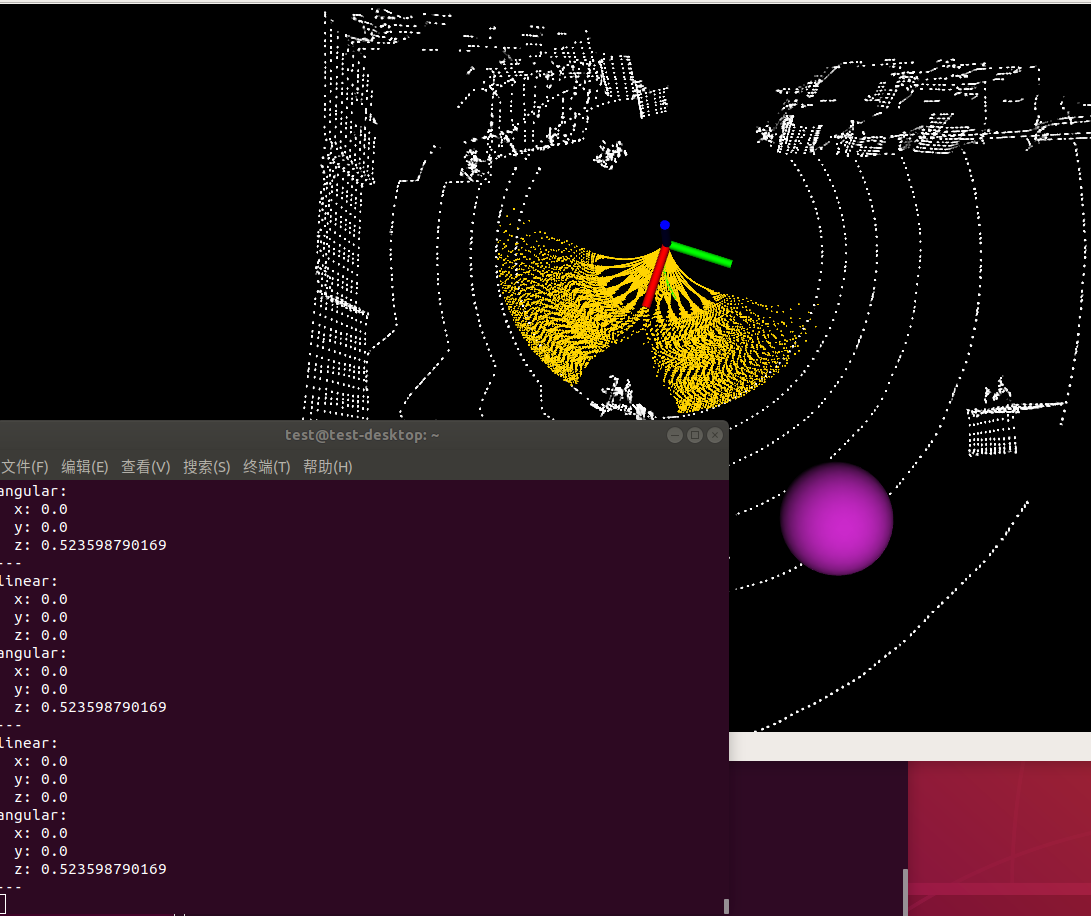
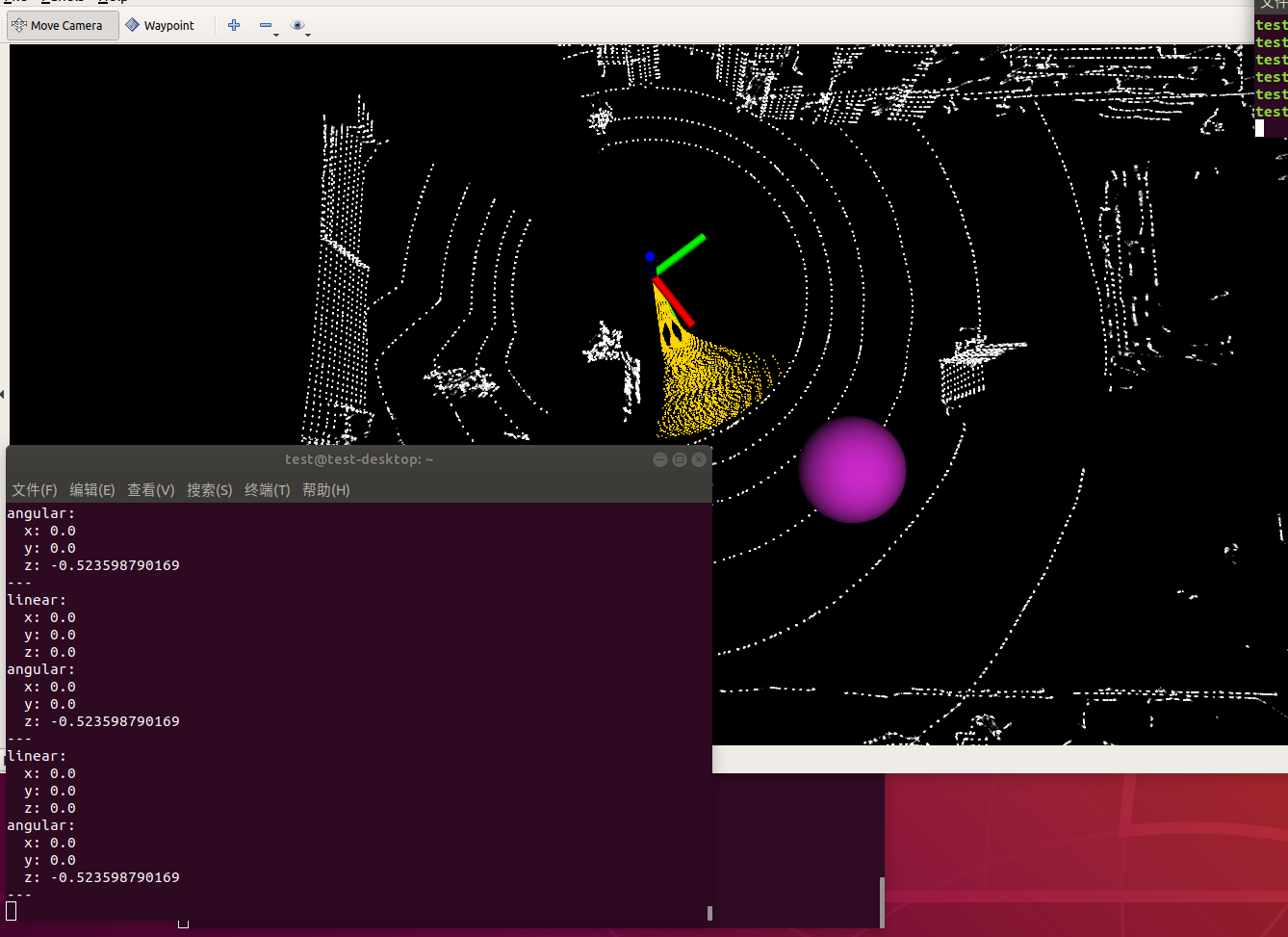
在测试过程中可以看到已经选中正常的路径,但是在很多情况下,pathfollow发布的cmd_vel还是只有旋转角度信息,所以我的小车还是只有前轮发生旋转。我起初以为是waypoint设置的位置角度偏差太大的问题,但是即使设置正前方有时候也不行,如下图两种情况
除此之外,我只在launch文件中修改了车身长宽、最大速度、点云裁剪范围的信息。不知是否有其它的一些相关的设置会有影响呢?

你好 请问你这个部署的到阿克曼小车的话做了哪些修改?方便的话可以私信了解一下吗



再补充一下,当waypoint不在正前方的时候,准确来说是规划的路径不是向前的时候,我们的算法是倾向于先转向再直线行走的。

你好,第一幅图里确实是因为waypoint不在正前方,需要先转向,这个是正常的。第二幅图里,free_path的分布有些异常,右侧没有任何的free_path, 我看你终端输出的信息和图中路径是对应的。现在的问题是路径规划的有些问题,执行上是没问题的。请问你有设置别的参数限制free_path的范围吗,或者你先试一下在空旷些的地方再测试一下,看一下没有障碍物的情况下free_paths以及最终的path是不是正确。
我订阅了/path信息发现path是没有问题的,查看了pathfollow的代码发现是在if (fabs(vehicleSpeed) <= maxAccel / 100.0) 出现的问题,vehicleSpeed比较小,一直被置零。我使用的是autonomyMode,运行过程中虽然有相关报错:
Couldn't open joystick /dev/input/js0. Will retry every second. 但是感觉是不是不应该有影响?
