


4,446
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
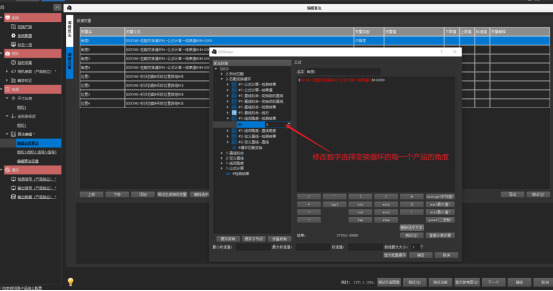
分享一、检测要求:
检测视野范围内每一个产品的坐标点输出引导定位,并且按照指定的位置旋转角度。
二、算法设置
1、检测思路
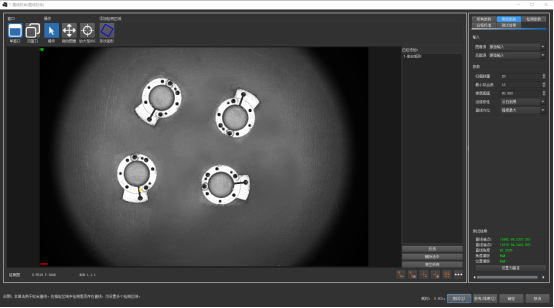
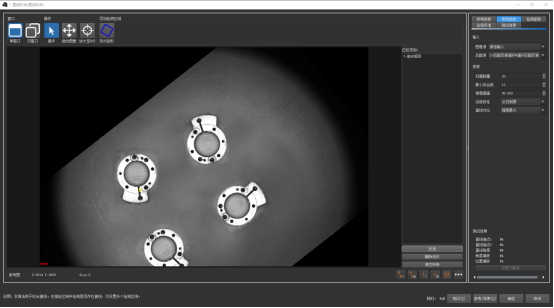
检测产品时产品是无序放置的,用形状匹配寻找多个产品,可以确定每一个产品的像素坐标。
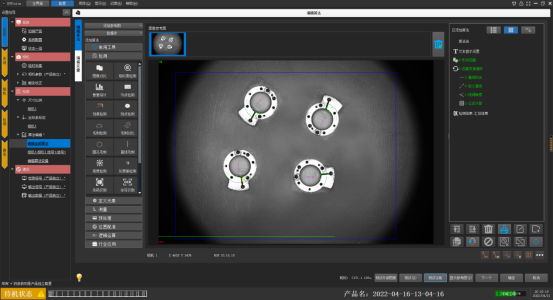
确定一个产品的位置为基准位置,使其角度为0。也就是不需要旋转。其它产品的角度根据基准位置进行对比。
根据检测需求算法的大概思路为:
形状匹配——直线拟合——定义直线——线间角度——公式计算——匹配变换循环
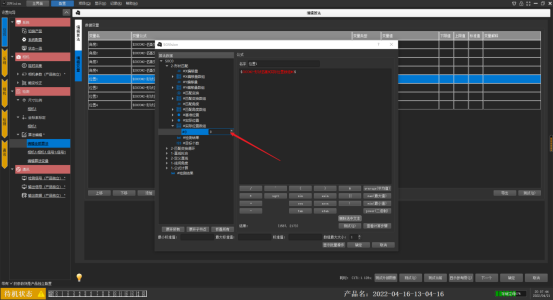
2、算法设置
(1)形状匹配
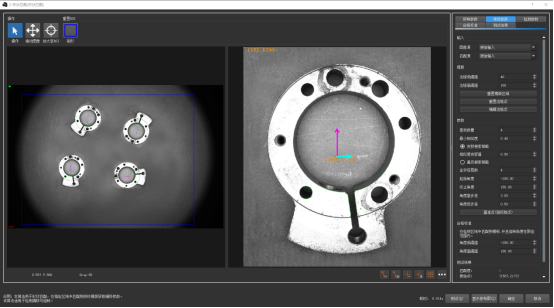
(2)直线拟合
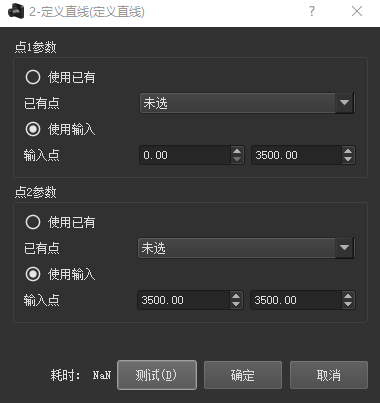
(3)定义直线
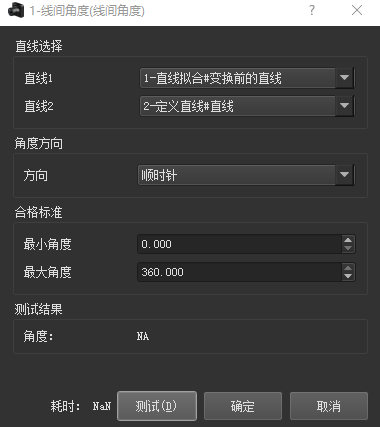
(4)线间角度
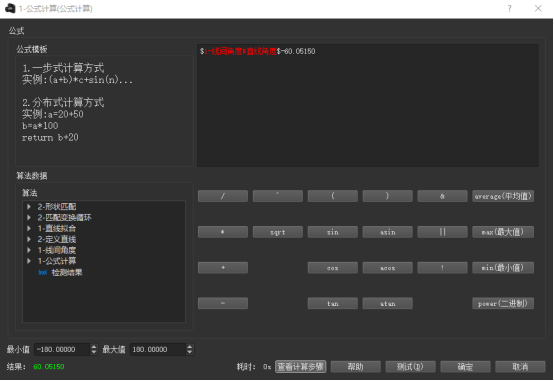
(5)公式计算
(6)匹配变换循环
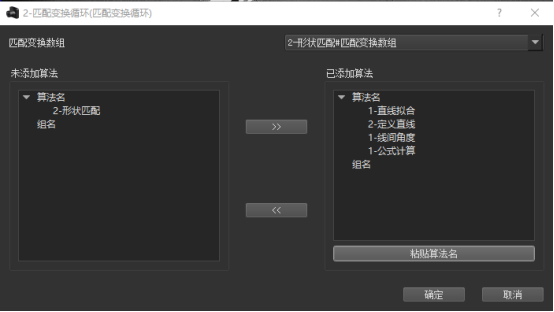
把前面4个算法放入匹配变换循环之后,打开直线拟合,【匹配源】改为匹配变换循环。
测试结果无误后,算法设置完成。点击右下角【确定】保存。
三、输出设置
1、添加变量
根据需要输出的坐标和角度来编辑变量添加需要输出的变量
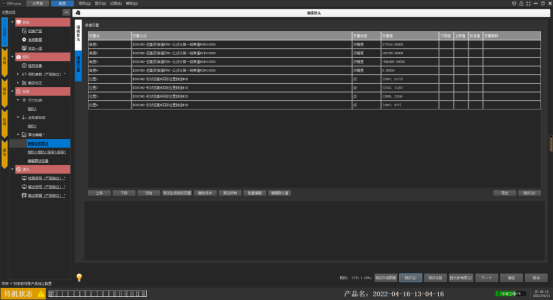
添加完所有变量测试后保存。
2、输出数据
在【通讯】——【输出数据】中添加需要输出的数据变量。
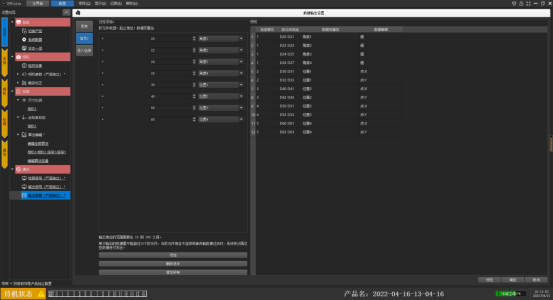
预览后保存设置,本来视觉引导定位是需要先进行标定,建立相机坐标系和机器人坐标系的一个对应关系,然后使用算法【机械坐标转换】转换为机械坐标的,但是昨天有一个用户说是不需要标定和转换,他要自己写程序,因此给他做了这个算法,有同样需求的用户可以参考一下。

