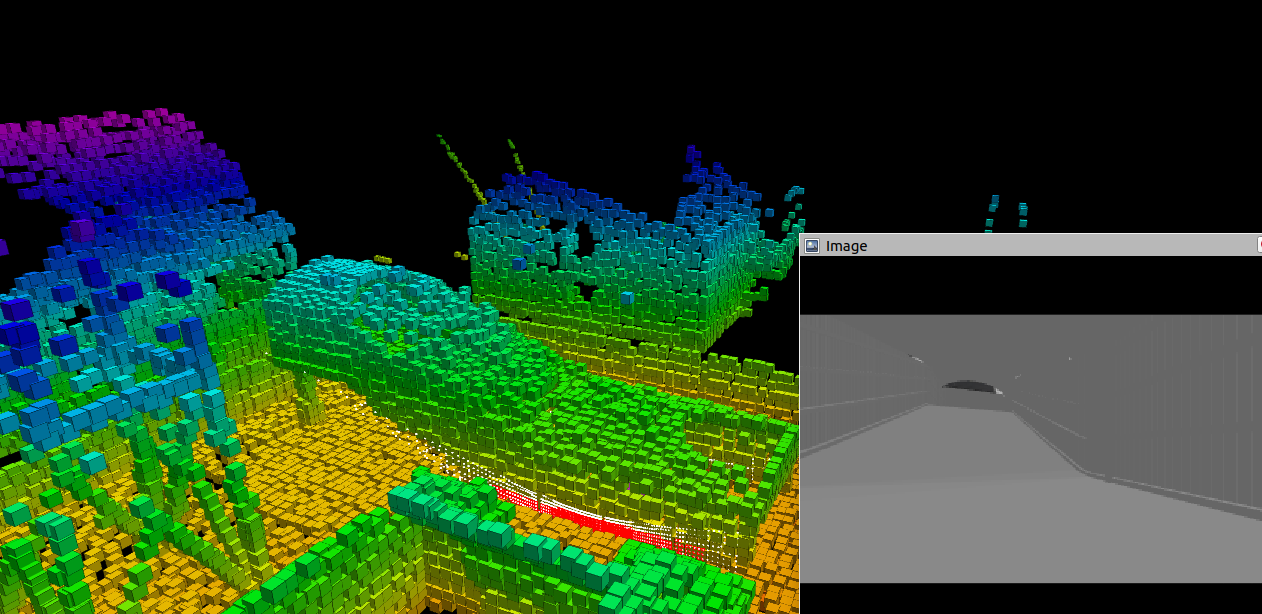
求大佬指点,为什么我在用local_planner和far_planner的时候上不去坡?这是我自己画的一个铁皮棚子,里面有一个坡道。
目前算法的地形分析会把陡坡识别成障碍,如果是个大缓坡就不存在这个问题了,应该需要在地形分析的cpp中进行改进
检测成障碍了也许
1,150
社区成员
453
社区内容
加载中
试试用AI创作助手写篇文章吧


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享