

1,151
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享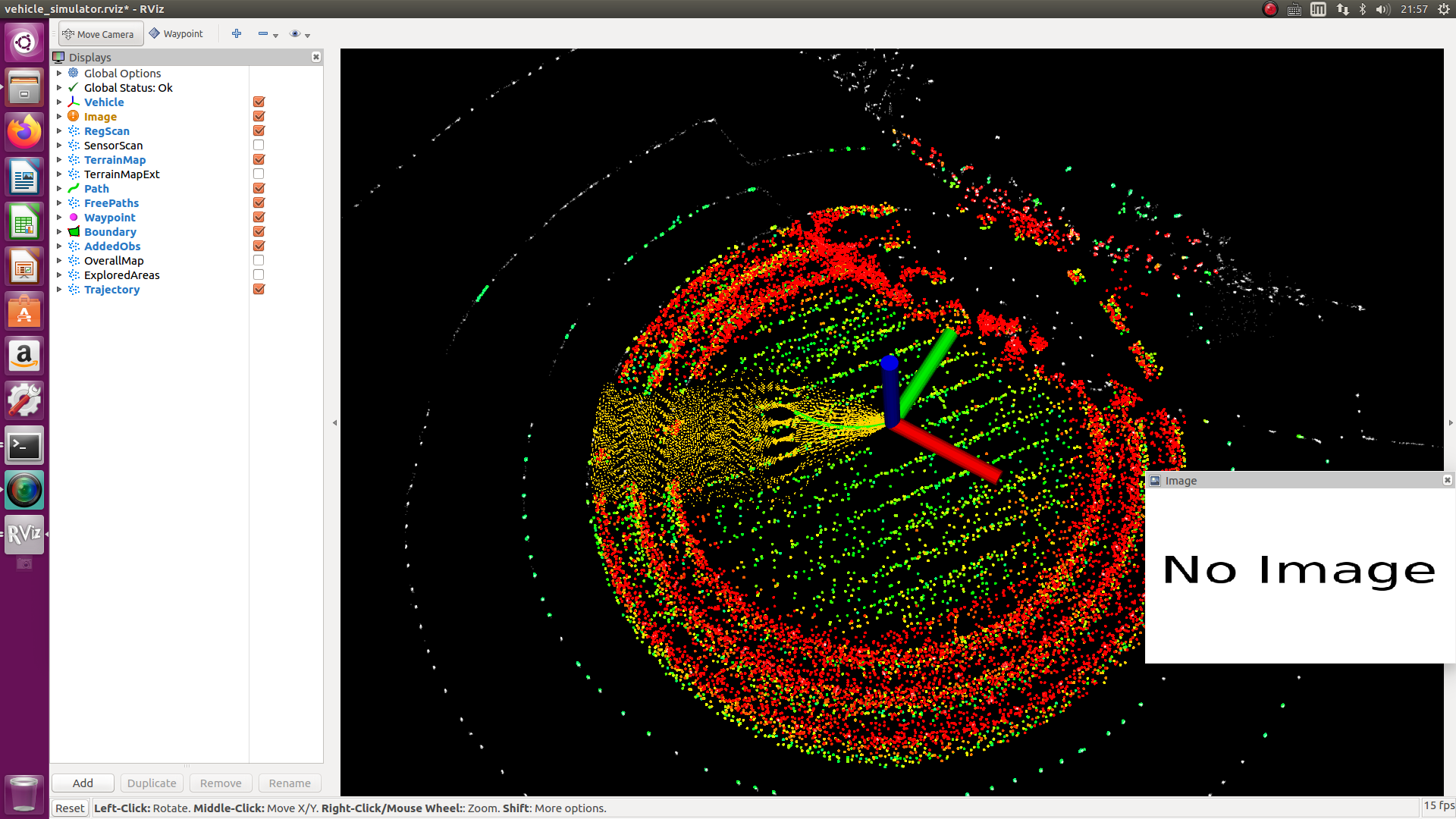
各位博士好:
如上图所示,我们在室外柏油路面上打转会出现小车周围的点云都变红的情况,即地形代价太大;柏油路上直行走也很容易出现一些点代价变大的情况,但比转圈要好很多;我们猜测是地形算法的阈值需要调整,太灵敏了。
请问我们需要在哪些配置文件上更改哪些参数;或者源码哪个部分?感谢!!!

问题已找到,主要调整vehicleHeight = 1.5(车辆的高度)、minRelZ (点云处理的最小高度)、maxRelZ(点云处理的最大高度)这三个参数;经过调整,车辆高度根据实际设为0.75,minRelZ 设为-0.7,在原地打转的情况下好了很多,没有出现很多红色点;但是由于这个框架中的地形处理是直接对点进行阈值处理,就会有很灵敏的反应,在这种柏油路面很容易有红色不可通行出现,即噪点。后续我们实验室的工作之一就是对这个地形进行更加鲁棒合理的处理,再次感谢CMU团队的开源,让我们节省了很多时间自己弄一个框架,感兴趣的同仁可以一起交流。


