社区
DeepStream社区
交流讨论
帖子详情
VScode(C/C++)无法自动生成launch.json文件解决办法
Aster
新星创作者: 人工智能技术领域
2022-09-09 09:46:33
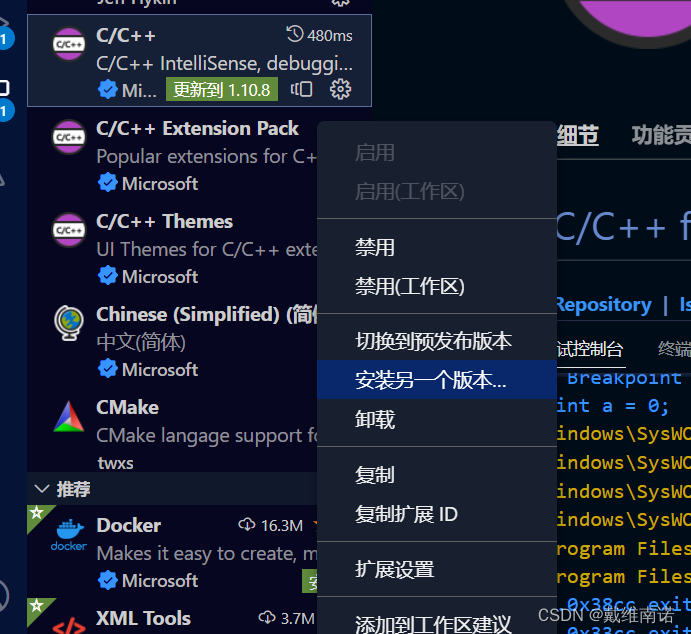
可能原因:装载的是最新版如下图的插件
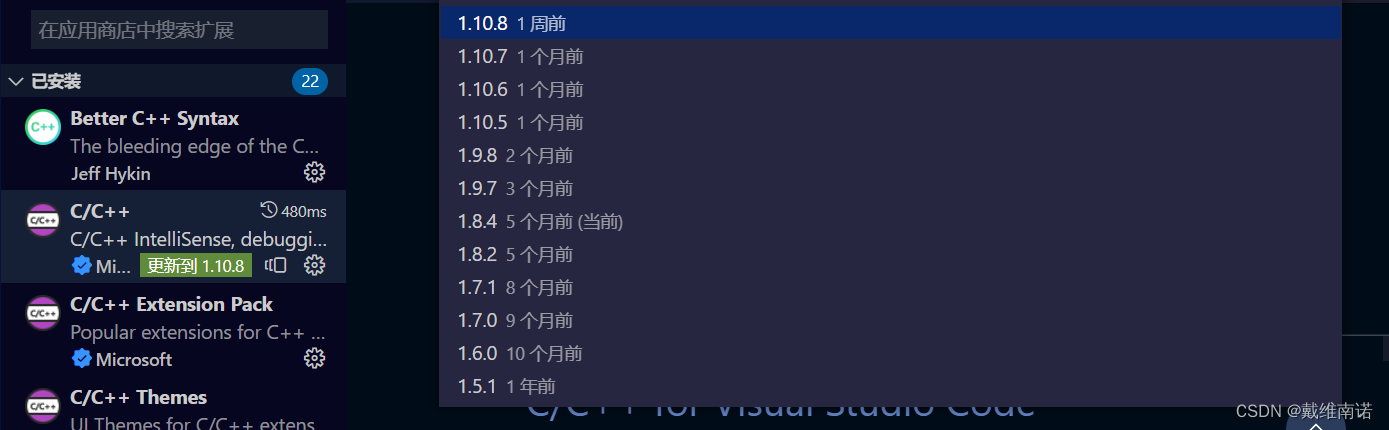
左键点击这个小齿轮:选择安装另一个版本,
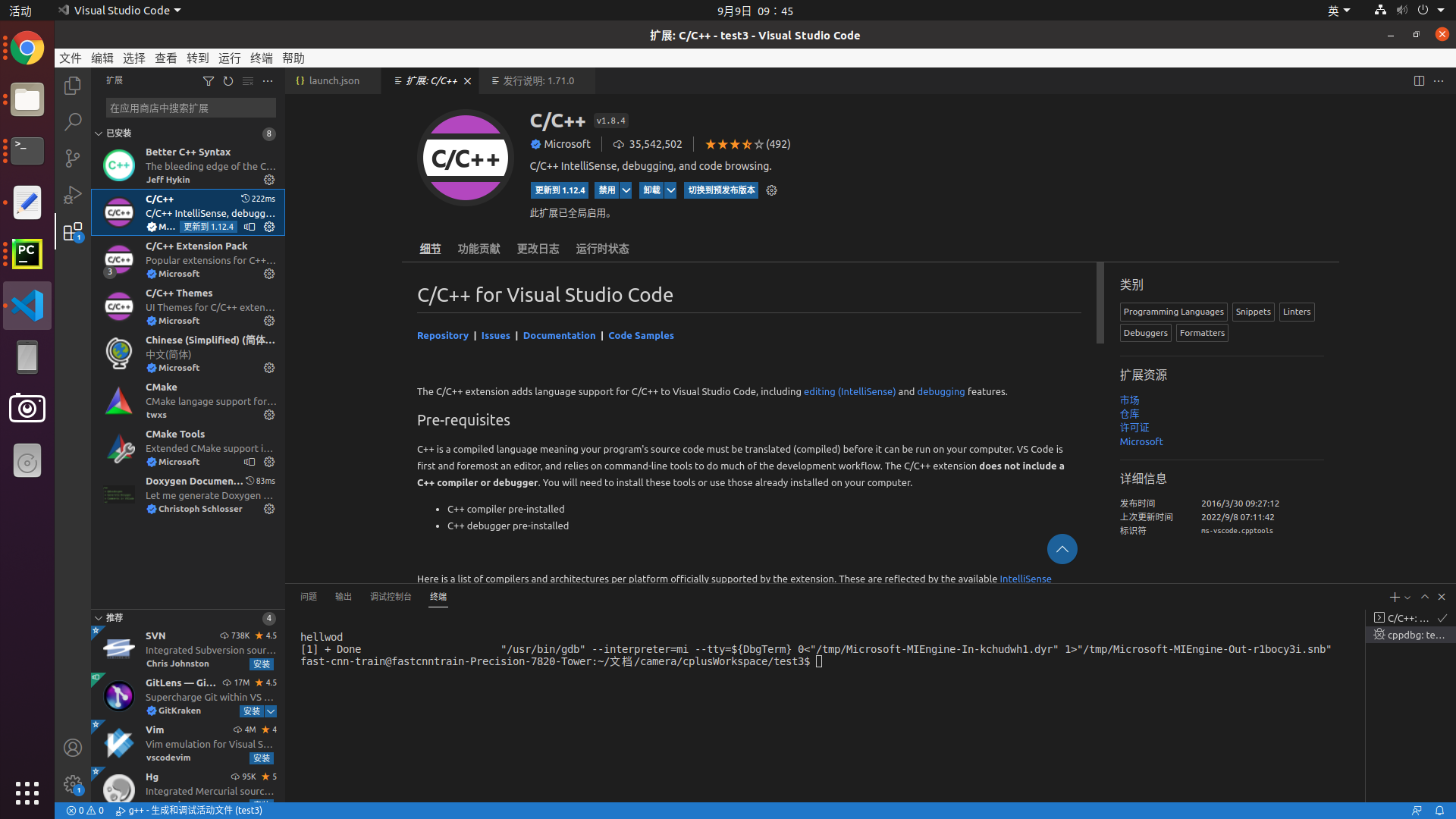
更新后的版本1.8.4:
...全文
879
回复
打赏
收藏
VScode(C/C++)无法自动生成launch.json文件解决办法
可能原因:装载的是最新版如下图的插件 左键点击这个小齿轮:选择安装另一个版本, 更新后的版本1.8.4:
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
在
VScode
下配置C/
C++
环境(tasks.
json
、
launch
.
json
、c_cpp_properties.
json
)
tasks.
json
在编译首先运行hello.c
文件
(点击右上角的运行图标),再点击"C/
C++
:gcc.exe生成和调试活动
文件
",如图2所示。图2 运行当前活动
文件
经过步骤1,在工作区code
文件
夹下可以生成一个
文件
,如下图3所示。除了tasks.
json
配置
文件
外,
launch
.
json
、c_cpp_properties.
json
配置
文件
也放在.
vscode
文件
夹下。图3 产生的tasks.
json
文件
tasks.
json
文件
配置内容如下。在配置路径时只能使用\\或隔开目录。"tasks": [
vscode
一键配置C/
C++
多个C及CPP
文件
编译与tasks.
json
和
launch
.
json
原理
vscode
配置环境及配置原理 搜了很多的教程,发现要么教程太老,给的配置信息里面有些参数都不能使用了,要么就是直接扔下自己的配置信息就没了,不知道咋来的,也不能拿过来直接用,让我这种小白无从下手,于是就摸索整理一下,帮助一下像我这样小白刚入手的小伙伴们。 原理 我觉得最重要的就是我们要明白各个配置
文件
是干嘛的,它是怎么被
vscode
使用的,明白这一点,那么自己就可以比较清晰参数该怎么改,应该改哪些参数,而不是拿着别人的配置
文件
,无从下手。配置
文件
基本的原理(只是原理,不是咋配置的):
vscode
使用的最
【
VSCode
】Windows下
VSCode
编译调试c/
c++
【更新 2018.03.27】
————————– 2018.03.27 更新————————- 便携版已更新,点此获取便携版 已知BUG:中文目录
无法
正常调试 用于cpptools 0.15.0插件的配置
文件
更新 新的
launch
.
json
// Available variables which can be used inside of strings. // ${workspaceRoot}: the root...
VSCode
中C/
C++
.
json
文件
的配置
VSCode
中C/
C++
环境配置 看了一些大佬的
vscode
c/
c++
环境配置攻略,结合自己的理解,在这里我将我的.
json
配置分享给大家,供大家参考,希望能在您学习路上带来一些帮助。我用的编译器是WinGW。 话不多说,开始各个
文件
的配置及代码(直接复制即可,部分地址需要修改,已在备注内标出)。.
json
文件
没有按先后顺序排序,请根据对应的
文件
修改。 首先是c_cpp_properties....
VSCode
在linux服务器下
launch
.
json
和tasks.
json
等
文件
配置
VSCode
在linux服务器下
launch
.
json
和tasks.
json
等
文件
配置
DeepStream社区
66
社区成员
230
社区内容
发帖
与我相关
我的任务
DeepStream社区
基于NVIDIA的DeepStream SDK开发技术交流社区。通过DeepStream可从USB/CSI/RTSP相机中获取流数据,用于快速构建具有AI能力的应用程序。
复制链接
扫一扫
分享
社区描述
基于NVIDIA的DeepStream SDK开发技术交流社区。通过DeepStream可从USB/CSI/RTSP相机中获取流数据,用于快速构建具有AI能力的应用程序。
自动驾驶
pytorch
边缘计算
个人社区
陕西省·西安市
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享