1,150
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享编译过程没有问题,mesh中的几个环境也下载下来了,是通过压缩包解压后然后放进去的
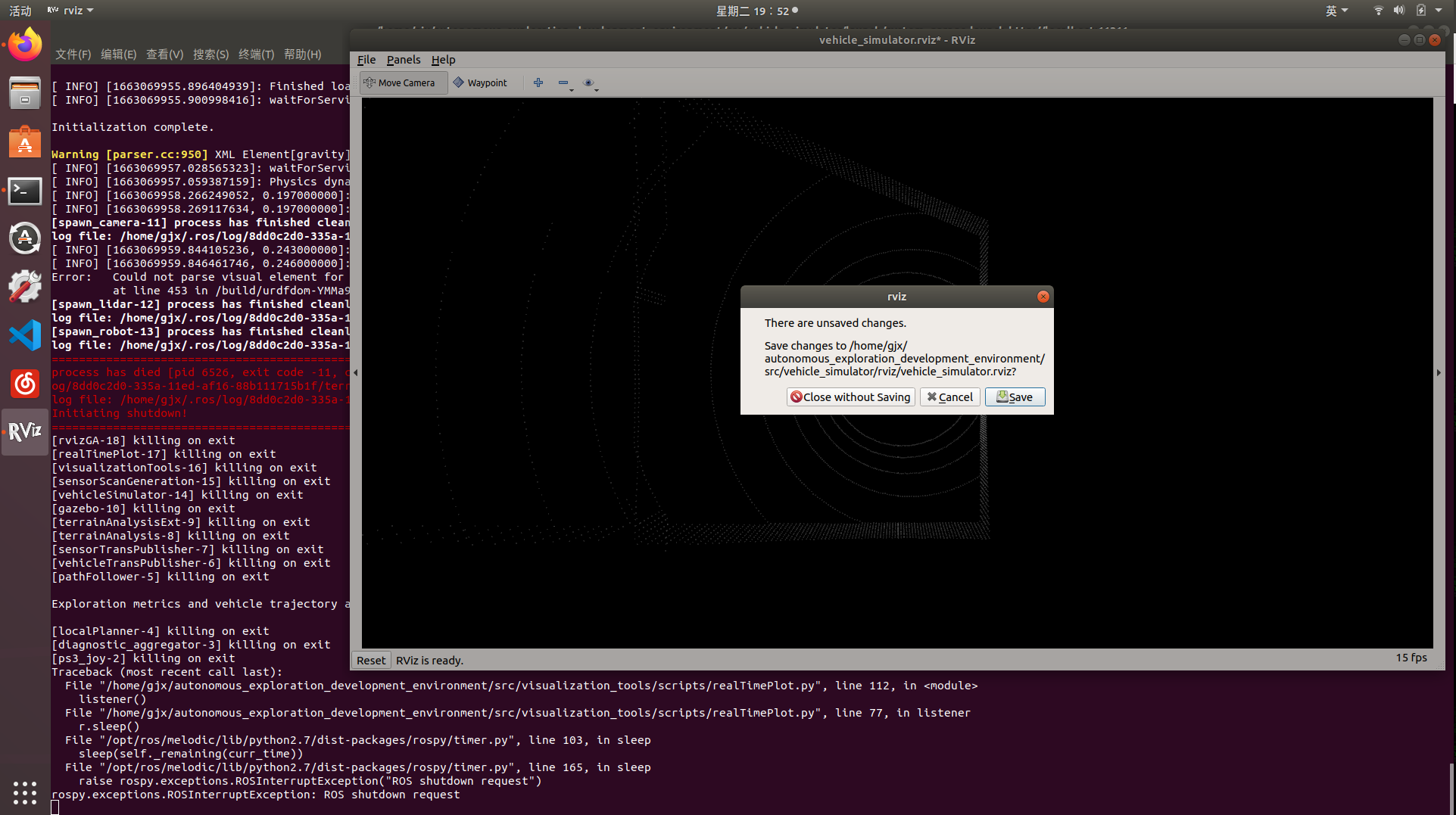
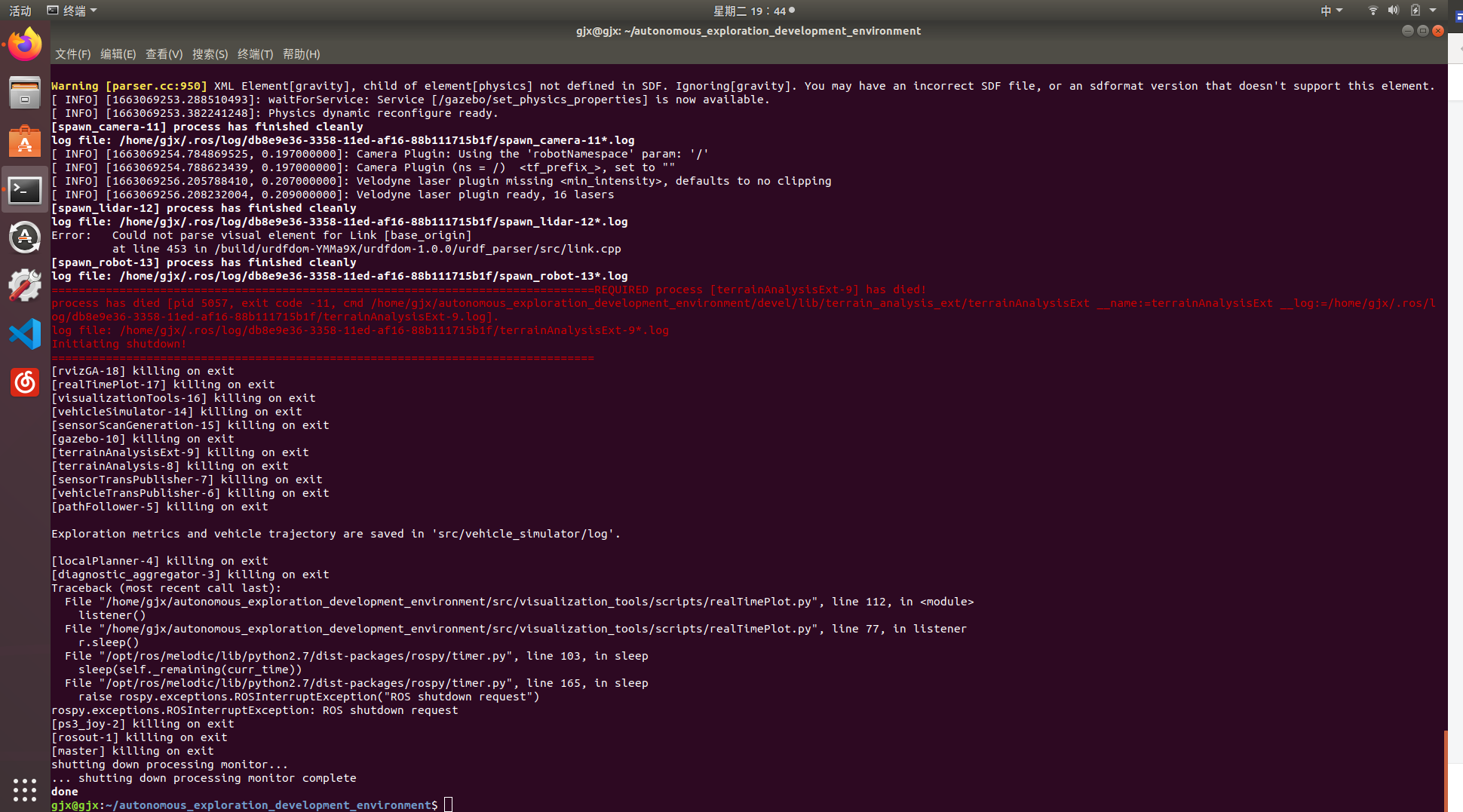
在运行时出现节点死掉,每次运行roslaunch后,过一小会rviz中会显示点云(瞬间),然后马上会出现节点死掉
具体如图,麻烦各位提供一些解决思路!

来更新一些这个帖子,这个问题确实挺奇怪的,我当时没进行进一步解决。后来因为一些原因我重装了ubuntu,然后再次运行时,就没有这个问题了,TARE和仿真环境都正常进行。
对了,在launch中删除掉下面的,可以运行,但是设置导航点也没反应(车子不动)

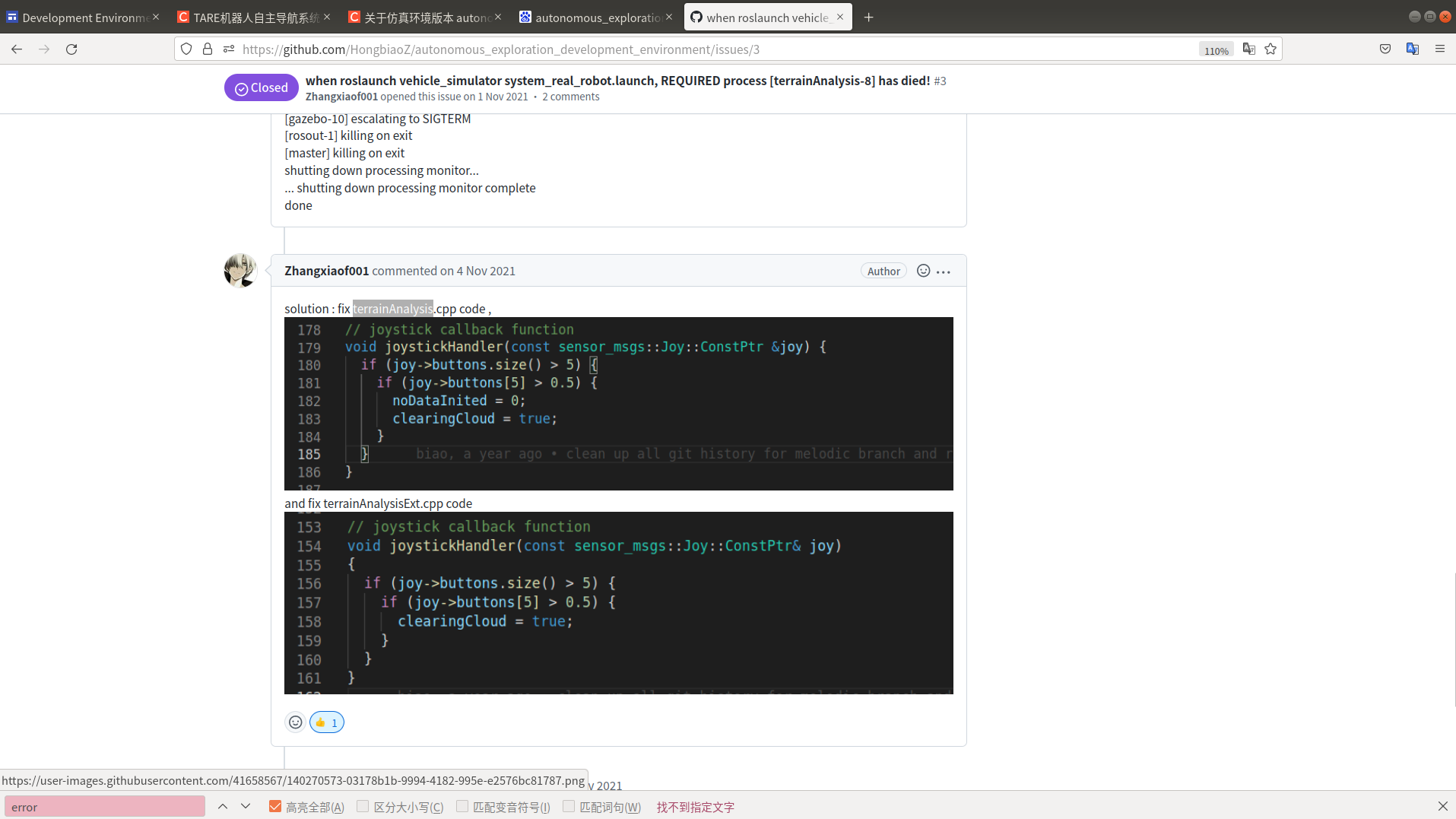
看样子和github上的一个问题比较相似,但根据解决方案改过还是死掉闪退