



128,120
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
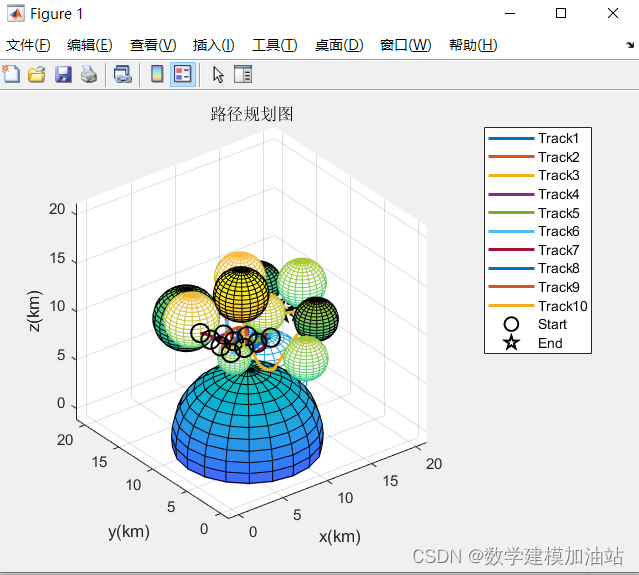
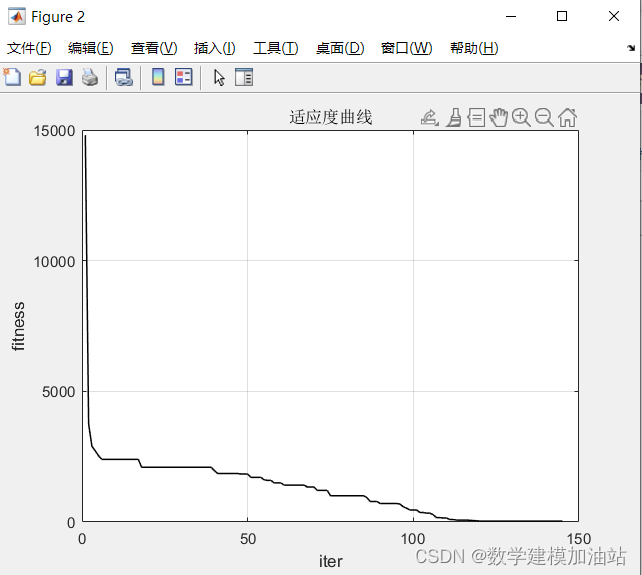
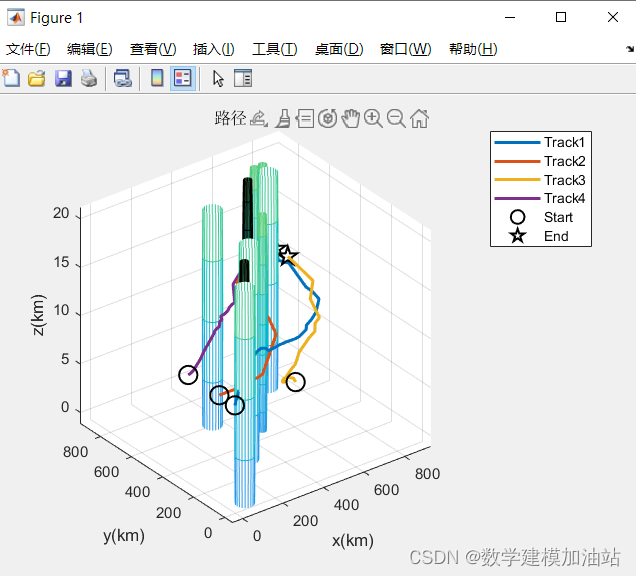
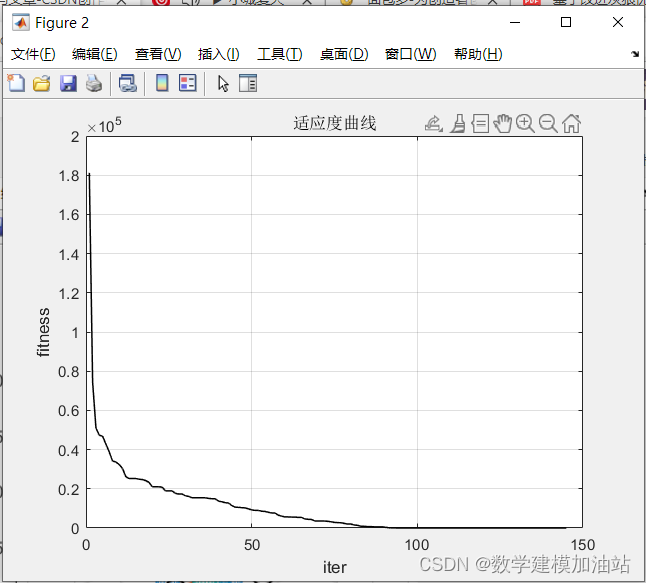
分享多无人作战飞机(UCAV)协同航迹规划是多 UCAV 协同作战的重要组成部分,对协同作战的结果有 很多的指引作用。多UCAV协同航迹规划属于多峰值优化函数求解问题,其求解稳定性比较差。为解决多 UCAV 协同航迹规划求解稳定性较差的问题,首先在对影响多机协同约束条件研究分析的基础上,结合单 机航迹规划求解中的核心指标,建立了多 UCAV 协同航迹优化函数;利用多种群灰狼算法(MP-GWO) 在求解多峰值优化函数问题上比较稳定的特点进行求解。
1、部分代码
%%% 灰狼优化算法航迹规划 %%%
clc, close all
%--- 算法选择 1:GWO算法 2:MP-GWO算法 3:CS-GWO算法
options = 2;
%--- 算法参数设置
SearchAgents = 60; % 搜索智能体个数/狼群数量/可行解的个数 (>= 20)
Max_iter = 145 ; % 最大搜索步数
%--- 协同无人机设置
UAV = UAV_SetUp1; % 在 UAV_SetUp.m 文件进行设置
%--- 灰狼算法
if options < 2
solution = GWO(UAV, SearchAgents, Max_iter); % GWO算法
elseif options < 3
solution = MP_GWO(UAV, SearchAgents, Max_iter); % MP-GWO算法
else
solution = CS_GWO(UAV, SearchAgents, Max_iter); % CS-GWO算法
end
%--- 绘图
IMG_AutoPlot(solution, UAV) % 自适应绘图(全自动绘图)
% IMG_Plot(solution, UAV) % 手动绘图(需手动添加无人机)
function UAV = UAV_SetUp
%UAV_SETUP 在此设置多无人机协同航迹规划任务
% 10个无人机协同突防
% 航迹点设置
% (每行为一个无人机的参数)
UAV.S = [ 1.5, 1.5, 15;
0, 1.5, 15;
1.5, 0, 15;
0, 3, 15;
3, 0, 15;
0, 0, 15;
0, 4.5, 15;
4.5, 0, 15;
1.5, 3, 15;
3, 1.5, 15; ]; % 起点位置 (x,y)或(x,y,z)
UAV.G = [ 20, 20, 4;
16, 20, 5;
20, 16, 5;
18, 20, 4.5;
20, 18, 4.5;
18, 18, 5;
16, 18, 5.5;
18, 16, 5.5;
14, 20, 5.5;
20, 14, 5.5; ]; % 目标位置 (x,y)或(x,y,z)
UAV.PointNum = [ 30;
26;
24;
26;
24;
30;
24;
24;
24;
24; ]; % 每个无人机导航点个数(起始点之间点的个数)
UAV.PointDim = size(UAV.S, 2); % 坐标点维度 (由 起点 坐标决定)
UAV.num = size(UAV.S, 1); % UAV数量 (由 起点 个数决定)
% 威胁点设置 (x,y,r) 或 (x,y,z,r)
% (每行为一个威胁的坐标和半径)
UAV.Menace.radar = [ 5, 5, 17, 2.5;
15, 7, 10, 2;
17, 18, 8, 2;
8, 8, 0, 6.8;
8, 17, 8, 3; ]; % 雷达威胁(数学模型和其余威胁不同)
UAV.Menace.other = [ 4, 11, 12, 2.5;
10, 2, 10, 2;
5, 6, 10, 1.5;
10, 8, 12, 1.8;
11, 13, 13, 2.3;
13, 14, 9, 1.8;
18, 13, 10, 2.2;
16, 16, 0, 4; ]; % 导弹、火炮、气象等威胁
% 无人机约束设置(min,max)
% (可单独为每个无人机设置,每行为一个无人机约束的上下限)
UAV.limt.v = 0.34*repmat([0.3, 0.7], UAV.num, 1); % 速度约束 (0.3Ma ~ 0.7Ma)
UAV.limt.phi = deg2rad(repmat([-60, 60], UAV.num, 1)); % 偏角约束 (-60° ~ 60°)
UAV.limt.theta = deg2rad(repmat([-45, 45], UAV.num, 1)); % 倾角约束 (-45° ~ 45°)
UAV.limt.h = repmat([0.02, 20], UAV.num, 1); % 高度约束 (0.02km ~ 20km)
UAV.limt.x = repmat([0, 20], UAV.num, 1); % 位置x约束 (0 ~ 875km)
UAV.limt.y = repmat([0, 20], UAV.num, 1); % 位置y约束 (0 ~ 875km)
UAV.limt.z = UAV.limt.h; % 位置z约束 (忽略地球弧度)
UAV.limt.L = zeros(UAV.num, 2); % 航程约束 (最短航迹片段2km,最大航程1.5倍起始距离)
for i =1:UAV.num
zz.max = 1.6 * norm(UAV.G(i, :) - UAV.S(i, :));
zz.min = 0.5;
UAV.limt.L(i, :) = [zz.min, zz.max];
end
% 多无人机协同设置
% (说明略)
UAV.tc = 160; % 协同时间 (单位s)
UAV.ds = 0.5; % 安全距离 (单位km)
% 报错
ErrorCheck(UAV)
end
%% 程序自检
function ErrorCheck(UAV)
dim = UAV.PointDim;
if dim ~= size(UAV.G,2) || dim ~= size(UAV.Menace.radar,2)-1 || dim ~= size(UAV.Menace.other,2)-1
if dim ~= size(UAV.G,2)
error('仿真维度为%d,但目标点坐标为%d维', dim, size(UAV.G,2))
else
error('仿真维度为%d,但威胁点坐标为%d维', dim, size(UAV.Menace.radar,2)-1)
end
end
num = UAV.num;
if num ~= size(UAV.G,1) || num ~= size(UAV.limt.v,1) || num ~= size(UAV.limt.phi,1) ...
|| num ~= size(UAV.limt.theta,1) || num ~= size(UAV.limt.h,1) || num ~= size(UAV.limt.x,1) ...
|| num ~= size(UAV.limt.y,1) || num ~= size(UAV.limt.z,1) || num ~= size(UAV.limt.L,1)
if num ~= size(UAV.G,1)
error('无人机个数为%d, 但目标点有%d个', num, size(UAV.G,1))
else
error('约束条件个数与无人机个数不一致')
end
end
if num ~= size(UAV.PointNum, 1)
error('无人机个数为%d, 但为%d个无人机设置了导航点', num, size(UAV.PointNum, 1))
end
MaxPoint = floor(UAV.limt.L(:,2) ./ UAV.limt.L(:,1)) - 1; % 每个无人机支持的最大航迹点数量
for i = 1 : UAV.num
if UAV.PointNum(i) > MaxPoint(i)
error('%d号无人机导航点个数超出任务需求,请尝试减少导航点个数', i)
end
end
end
2、结果展示
代码见🍞正在为您运送作品详情
参考文献:
[1]许 乐 ,赵文龙.基于新型灰狼优化算法的无人机航迹规划[J]
[2]周瑞,黄长强,魏政磊,赵克新.MP-GWO 算法在多 UCAV 协同航迹规划
中的应用[J].空军工程大学学报(自然科学版),2017,18(05):24-29.
[3]柳长安,王晓鹏,刘春阳,吴华.基于改进灰狼优化算法的无人机三维航迹
规 划 [J]. 华 中 科 技 大 学 学 报 ( 自 然 科 学 版 ),2017,45(10):38-
42.
如有侵权,请联系删除~



