社区
DeepStream社区
交流讨论
帖子详情
ros仿真系列,ROS自学笔记Gazebo篇——Gazebo Building Editor的使用
Aster
新星创作者: 人工智能技术领域
2023-01-13 16:23:31
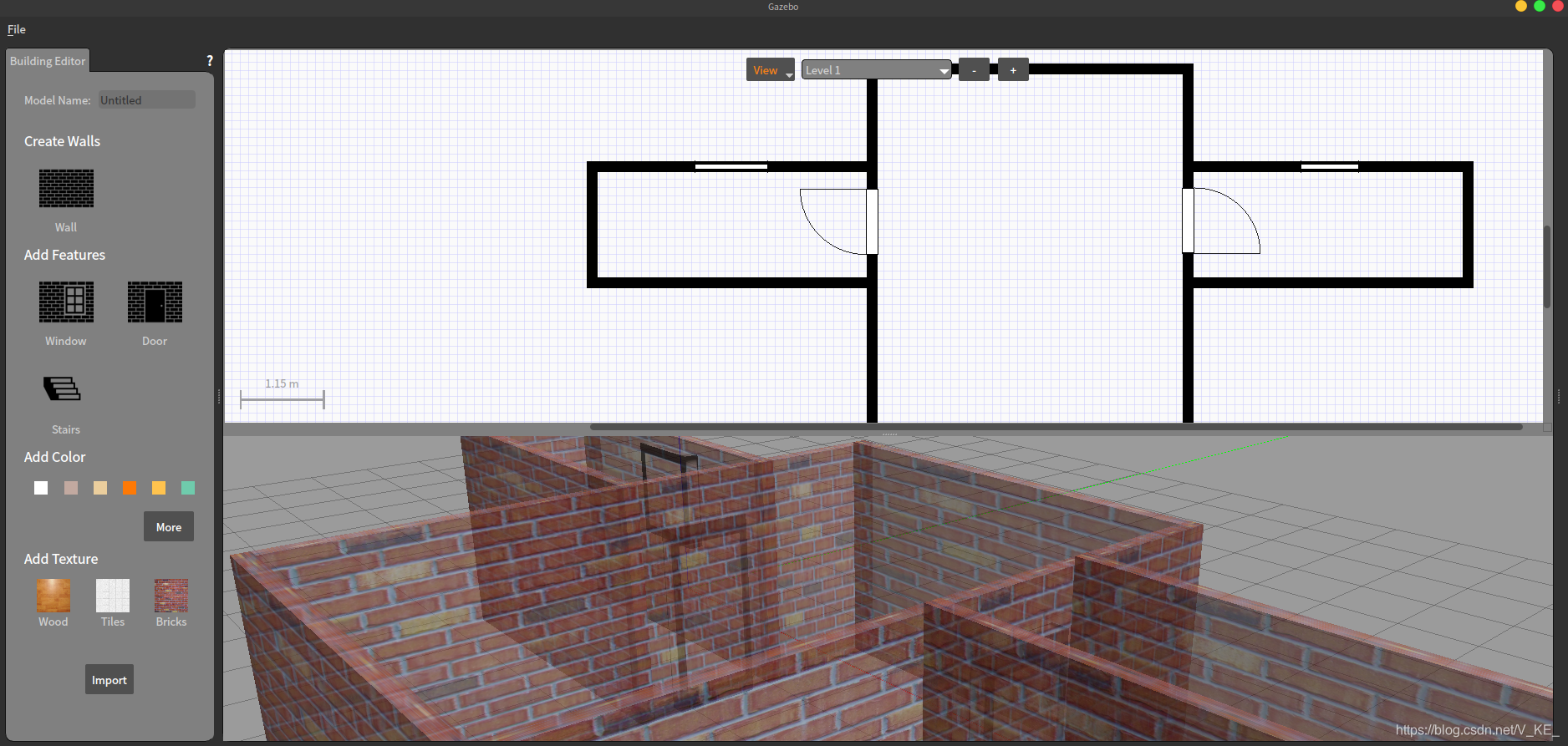
ROS自学笔记Gazebo篇——Gazebo Building Editor的使用
https://blog.csdn.net/sinat_16643223/article/details/117200713
...全文
659
回复
打赏
收藏
ros仿真系列,ROS自学笔记Gazebo篇——Gazebo Building Editor的使用
ROS自学笔记Gazebo篇——Gazebo Building Editor的使用 https://blog.csdn.net/sinat_16643223/article/details/117200713
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
ROS
Kinetic +
Gazebo
7实战:如何用
Build
ing
Editor
快速搭建机器人
仿真
实验室
本文详细介绍了如何
使用
ROS
Kinetic和
Gazebo
7的
Build
ing
Editor
工具快速搭建工业级机器人
仿真
实验室。通过对比传统三维软件与
Gazebo
的核心优势,提供工业环境设计、URDF模型优化、物理引擎配置等实战技巧,帮助开发者高效构建包含物理交互和传感器
仿真
的专业
仿真
环境。
SLAM学习
笔记
——从零搭建完整的
gazebo
多机
仿真
SLAM(一)
文章目录引言第一部分 搭建
gazebo
仿真
环境
使用
gazebo
的
build
ing
_
editor
搭建地图
使用
launch文件加载world文件第二部分 放入你的机器人 引言 这是一段比较完整的教程。将分为四
篇
文章四部分内容: 搭建
gazebo
仿真
环境,并且在虚拟环境中运行slam算法,保存环境地图。
使用
map_server打开保存的地图,并且使acml定位和move_base进行自主导航
使用
explore_lite功能包实现机器人边自主导航,边构建地图
使用
多个命名空间搭建多机器人SLAM系统 PS:文
【
ROS
】
Gazebo
仿真
环境搭建
【
ROS
】
Gazebo
仿真
环境搭建一、
Gazebo
中自定义地图二、在launch文件编写程序将自定义地图导入
gazebo
最近博主学习了如何在
Gazebo
中搭建
仿真
环境,并编写相应的launch文件去调用自定义地图,故在这里分享给大家,大家也可以学习以下,首先,参考上一讲中【
ROS
】URDF集成
Gazebo
的例程,上一讲内容荣链接如下,有需要的小伙伴可以去查看一下。 链接:
ROS
】URDF集成
Gazebo
. 一、
Gazebo
中自定义地图 打开vs code,打开fjy_xm路径下的catkin_urdf_
ROS
kinetic中 安装运行
Gazebo
&构建
仿真
环境
一、安装运行: 直接来指令吧: sudo apt-get install
ros
-kinetic-
gazebo
-
ros
-pkgs
ros
-kinetic-
gazebo
-
ros
-control 运行一下:
ros
core
ros
run
gazebo
_
ros
gazebo
如果有上边
Gazebo
界面出现就表明安装成功了! 验证
Gazebo
是否与
ROS
系统成功连接,可以查看
ROS
的话题列表和服务列...
用
ROS
自带的
gazebo
仿真
器搭建自己的环境
近期需要搭建一个室内
仿真
环境,用于实验调试,所以想把相关技巧记录下来,如有错误,还请批评指正,谢谢。 参考网页:
使用
gazebo
中的
build
ing
editor
创建一个建筑环境并用于
仿真
1.配置要求 系统:ubuntu14.04(其他版本也行,这个要求不严)
ROS
版本:indigo版本(这个关系到
gazebo
版本,每个
ROS
的都会有对应的
gazebo
版本,所以还是用indigo版本自...
DeepStream社区
66
社区成员
230
社区内容
发帖
与我相关
我的任务
DeepStream社区
基于NVIDIA的DeepStream SDK开发技术交流社区。通过DeepStream可从USB/CSI/RTSP相机中获取流数据,用于快速构建具有AI能力的应用程序。
复制链接
扫一扫
分享
社区描述
基于NVIDIA的DeepStream SDK开发技术交流社区。通过DeepStream可从USB/CSI/RTSP相机中获取流数据,用于快速构建具有AI能力的应用程序。
自动驾驶
pytorch
边缘计算
个人社区
陕西省·西安市
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享