https://blog.csdn.net/weixin_51067502/article/details/121943526
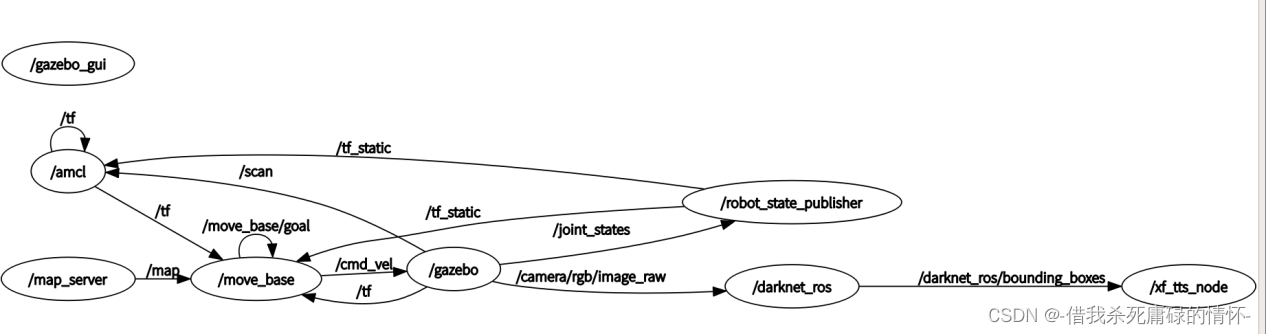
map_server发布map话题,需要系统进行tf或者自己tf链接坐标系
https://blog.csdn.net/weixin_45912291/article/details/125803475#t1
https://blog.csdn.net/WhiffeYF/article/details/109187804
66
社区成员
230
社区内容
加载中
试试用AI创作助手写篇文章吧




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享