


1,150
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享Colmap-PCD是我们团队开发的一款用于图像与点云配准的开源工具。这款工具有两个作用,第一是可以将通过不同设备采集的图像数据与点云数据进行配准并统一到相同的坐标系下,第二是将同一个设备采集的图像及点云数据配准,提高相机位姿估计的准确度。当然无论是用在哪一种情况下,最终都可以得到有效且精确的配准数据。
Colmap-PCD是基于原始的Colmap开发的,目的仍然是进行三维重建。为了提高三位重建的效果,我们的团队在原始的开源代码中加入了一系列的功能来将图像和点云中相关的特征信息关联起来,通过将图像与其他图像以及点云一起匹配解决联合优化问题。
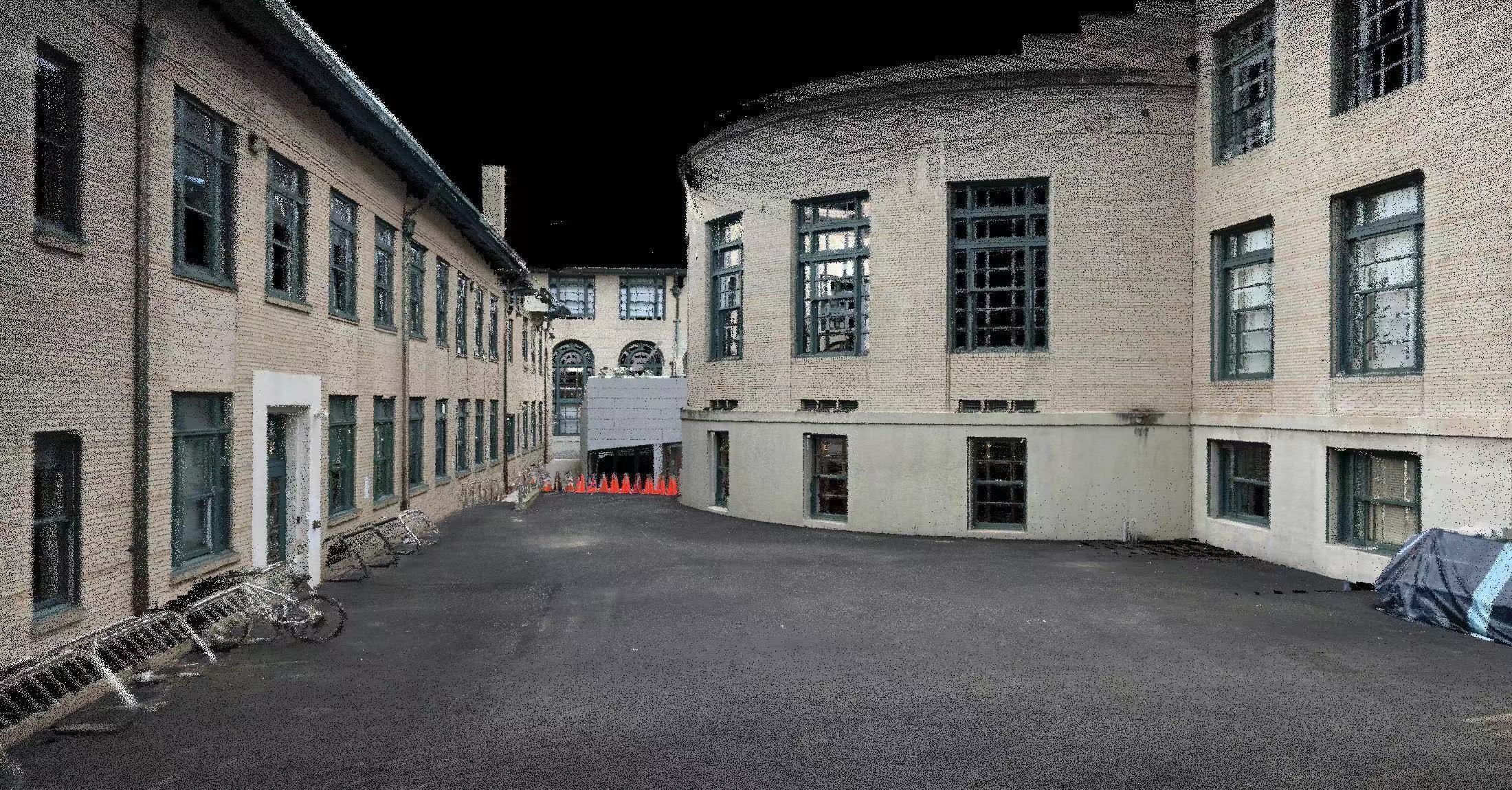
下面展示的是我们使用Colmap-PCD重建出的一张点云地图。点云中的颜色信息全部来自于我们采集的图像信息。
下面是Colmap-PCD源码的地址,欢迎大家了解和使用这款工具,希望这款工具能够真正给大家带来一些帮助或者启发。
GitHub: https://github.com/XiaoBaiiiiii/colmap-pcd

请问在进行深入估计的时候,找不到cuda是何原因,有搜到相关问题是因为版本不对应,那正确的cuda版本是什么可以告知一下吗
