

1,092
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
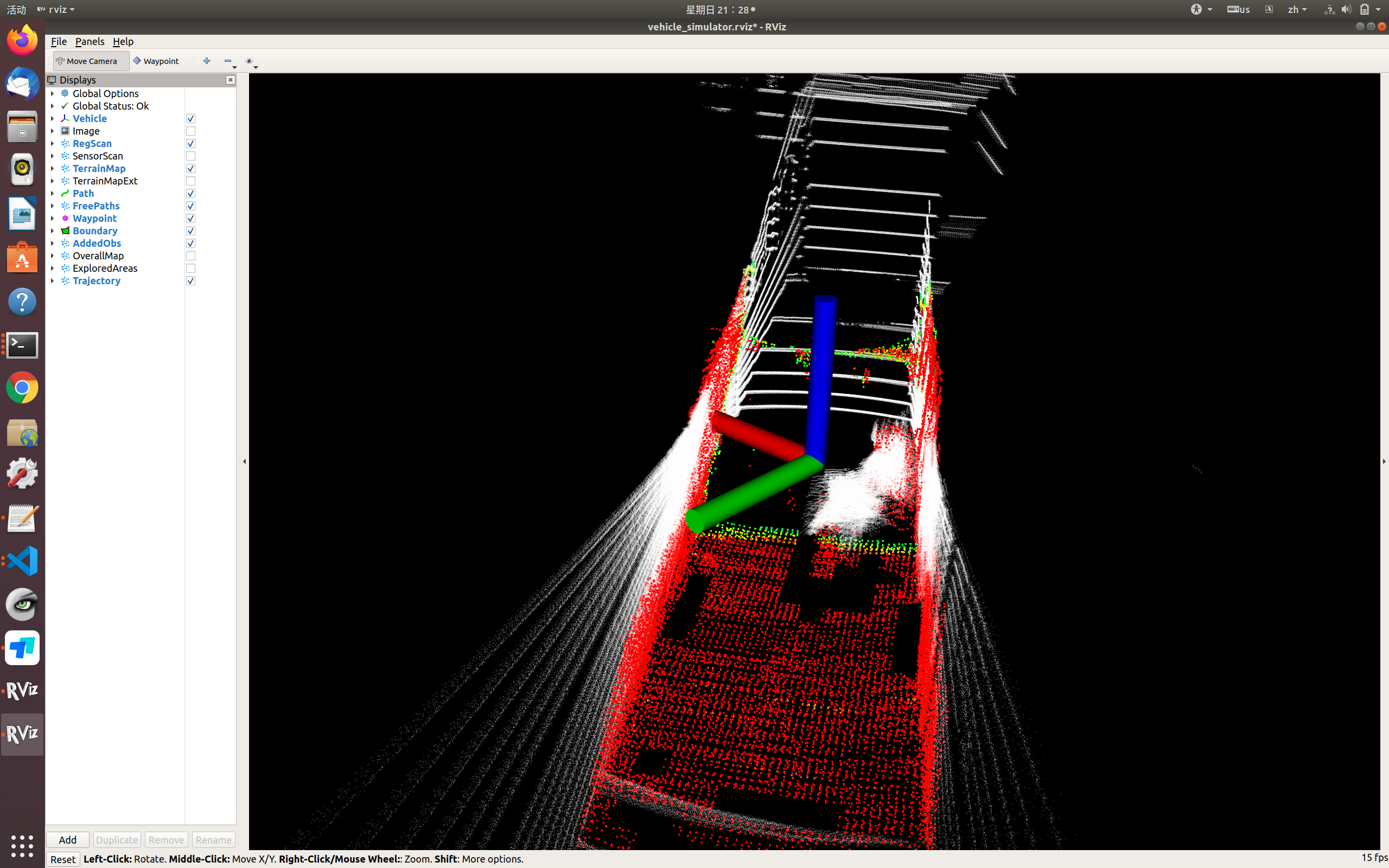
分享作者大大你们好,最近在实例化跑诸位大佬所作的tare-planer,出现了一些问题,特来请教。
1.小车的terrain-map在地面没有障碍物的情况下,仍然出现红点,如图所示,这因为什么呢,我已经调节了vehicleHeight为真实高度。
2.另外我想问一下,当行人从小车周围经过后,留下的小红点多久会消失呢,如果要让这些点云能够快点消失,应该调节那些参数啊?
3.还有就是,能否将far-planner的动态障碍物提取和消除移植到tare-planner,可行度高吗?
麻烦诸位大佬,不胜感激。

请问楼主找到解决方案了么?我也遇到了额类似问题

1.地面没有障碍物仍然出现红点。你可以查看一下机器人运动过程中激光雷达的原始点云中是不是会出现一些噪点,从上面图看,机器人周围不可通过的点挺多的,这些点肯定都是真实扫描到的。(假设你的定位是没有问题的)
2. terrain_analysis对于动态障碍物留下的点的消除效果并不出众,只能消除部分的点,并且是否消除这些点是与时间无关的,只和激光的视角有关,如果机器人静止的时候不能消除,那就需要让机器人运动一下,再查看是否消除。
3. tare-planner本身是有部分动态障碍物消除能力的,但是可能没有far-planner效果好,如果你想移植的话,是完全可行,两者的信息来源都是一样的
