社区
TARE机器人自主导航系统
问答区
帖子详情
Yousa589
2023-03-05 19:06:24
你好请教一下,实车部署DSVP后在走廊内使用,参数试过indoor和matterport,但总会出现rrt树生长只生长出一部分,以及连带的重定位阶段问题无法“回溯”,terrainmap一切正常,是有什么参数有问题吗
...全文
654
5
打赏
收藏
你好请教一下,实车部署DSVP后在走廊内使用,参数试过indoor和matterport,但总会出现rrt树生长只生长出一部分,以及连带的重定位阶段问题无法“回溯”,terrainmap一切正常,是有什么参数有问题吗
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
5 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
Yousa589
2023-03-06
打赏
举报
回复
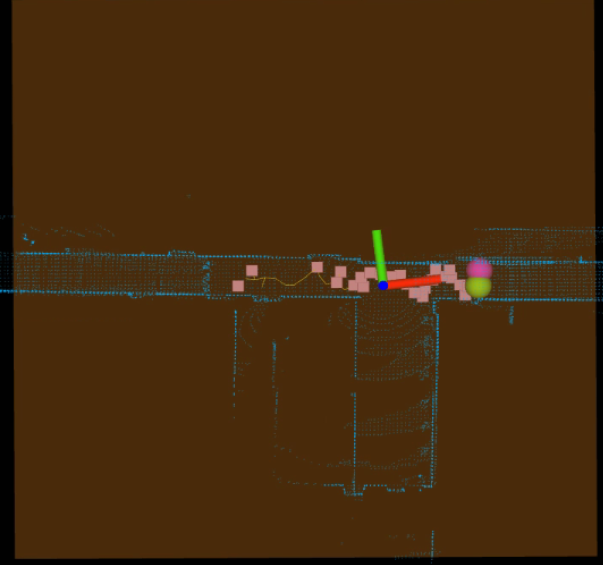
视频不好录,一会上传,暂时只有这个图
大致问题
1、遇到路口,RRT只往右侧生长,下方道路不生长,有时在原地迭代几次RRT都不会往下生成
2、图中往右侧 长直线走廊行驶5-6米后,也会出现RRT树生成不过去的状况(次数不多)
3、重定位无法回溯是指:探索阶段图中有生成视点,但重定位阶段并没有将未探测的子区域中的视点选为导航目标,直接return home 了
Yousa589
2023-03-06
打赏
举报
回复
暂时找出在状态估计算法ALOAM这一块z轴上有漂移,其他未知
哈工大-朱洪彪
社区管理员
2023-03-06
举报
回复
@Yousa589
你好,能放一些rrt只生长出一部分的视频吗,根据你的描述我不太好判断具体问题。另外,你说的重定位无法回溯是指什么呢,是车辆探索回到同一个地方后仍然认为没有探索吗?
Yousa589
2023-03-06
举报
回复
@哈工大-朱洪彪
https://www.bilibili.com/video/BV1x84y1P7f4/?vd_source=5a8b2e9675a6f0085a8d68788a9f5658
你好,这是在走廊上出现的情况,迭代四次后,在最后一次迭代树只长了一根出去,有时一根也没有。
哈工大-朱洪彪
社区管理员
2023-03-15
举报
回复
@Yousa589
你好,你可以查看一下octomap建的对不对。从你的视频和图上,确实不应该伸展不出去,尤其是上面的图,如果一直在尝试伸展,那下方空旷处应该是伸展最多的区域。这一点我暂时无法判断原因是什么,你的环境尺度大概是多大,机器人有多大呢。另外,你可以再查看一下terrain_map是不是都正确,排除定位以及地形分析的问题。
探索算法:
dsvp
学习笔记(exploration.cpp)
该节点为上层节点,负责总体逻辑,并没有具体实现。
【论文解读】
DSVP
:通过动态扩展实现快速探索的双
阶段
视点规划器
我们提
出
了一种高效地探索高度复杂环境的方法。该方法包含两个规划
阶段
,扩展地图边界的探索
阶段
和将机器人明确转移到环境中不同子区域的
重定位
阶段
。探索
阶段
发展局部快速探索随机
树
(
RRT
) 环境的自由空间,以及
重定位
阶段
通过映射环境来维护一张全局地图,都是动态扩展的过度重规划步骤。通过将该方法与现有先进的前沿算法在各种具备挑战性的模拟和真实环境中进行实验对比,实验结果比较表明,我们的方法在
使用
较少处理的空间探索空间方面的效率是现有方法的两倍。此外,我们发布了一个基准环境来评估探索算法并促进自主导航系统的开发。
CMU-LOAM系列论文研读(一)
DSVP
: Dual-Stage Viewpoint Planner for Rapid Exploration by Dynamic Expansion
本论文提
出
了一种有效的探索高度复杂环境的方法。该方法包含两个规划
阶段
-在探索
阶段
延伸边界图,在迁移
阶段
将机器人转移到环境中的不同子区域。探索
阶段
在环境的自由空间中
使用
快速探索Random
树
(
RRT
),在迁移
阶段
则在已建好的环境中维持一个全局图。两
阶段
都在重新规划
阶段
进行动态扩展。在各种具有挑战性的仿真和实际中,将该方法与现有的最先进的方法进行了比较,实验比较表明,我们的方法是可行,且
使用
更少的处理资源,探索空间的效率是现有方法的两倍。
探索算法:
dsvp
学习笔记(graph_planner.cpp)
学习
DSVP
: Dual-Stage Viewpoint Planner for Rapid Exploration by Dynamic Expansion论文源码
DSVP
Dual-Stage Viewpoint Planner for Rapid Exploration by Dynamic Expansion
文章来源: 2021,IROS 类型: 导航算法 阅读日期: December 16, 2021
DSVP
Dual-Stage Viewpoint Planner for Rapid Exploration by Dynamic Expansion.pdf
TARE机器人自主导航系统
1,135
社区成员
448
社区内容
发帖
与我相关
我的任务
TARE机器人自主导航系统
社区内分享我们的开源平台tare机器人自主导航系统,希望能帮助所有自主移动机器人领域的研究人员快速搭建出属于自己的,稳定可靠的机器人仿真和实验的平台,更快进入自己的研究领域
复制链接
扫一扫
分享
社区描述
社区内分享我们的开源平台tare机器人自主导航系统,希望能帮助所有自主移动机器人领域的研究人员快速搭建出属于自己的,稳定可靠的机器人仿真和实验的平台,更快进入自己的研究领域
自动驾驶
人工智能
企业社区
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享