




40
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
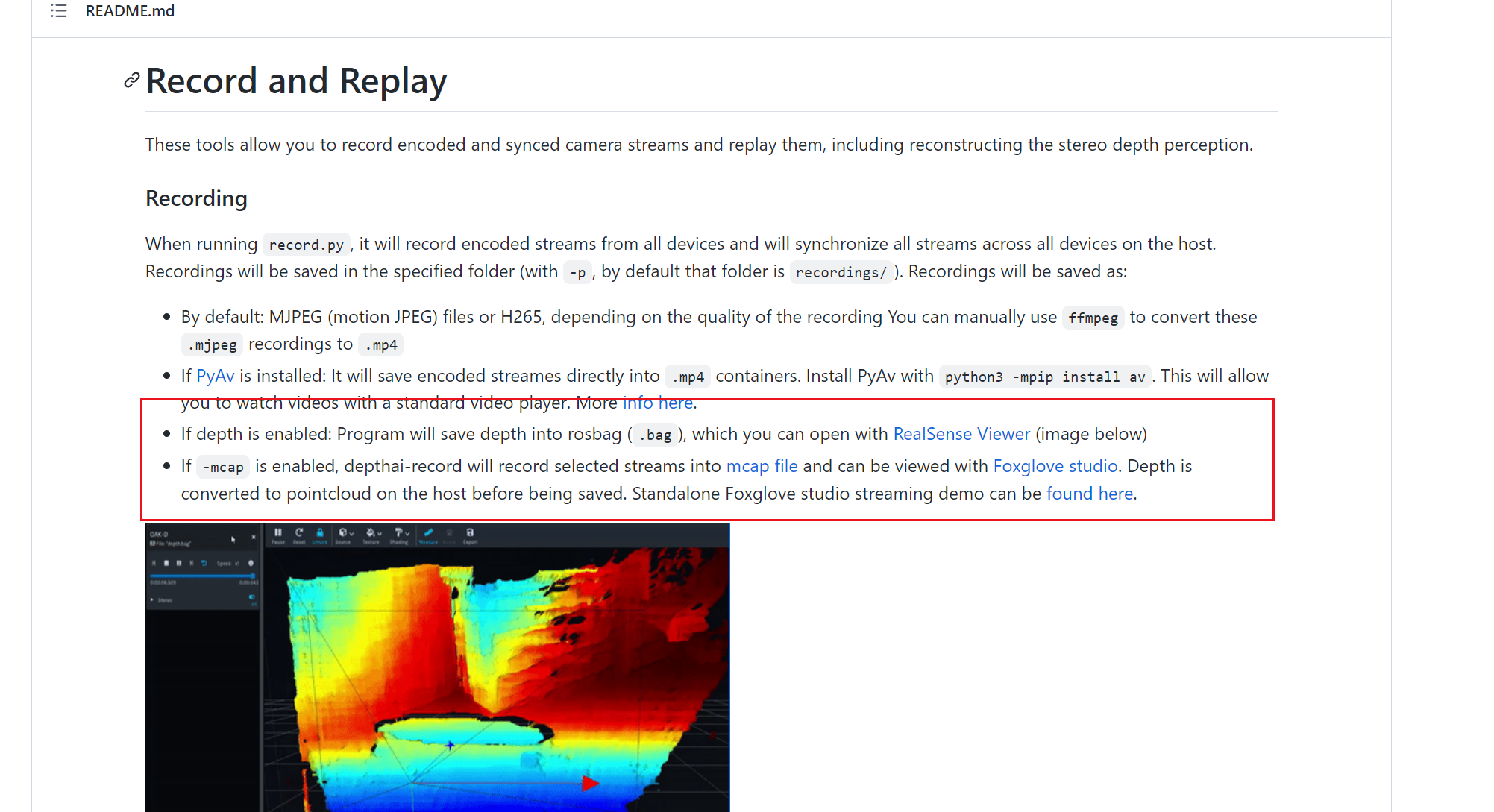
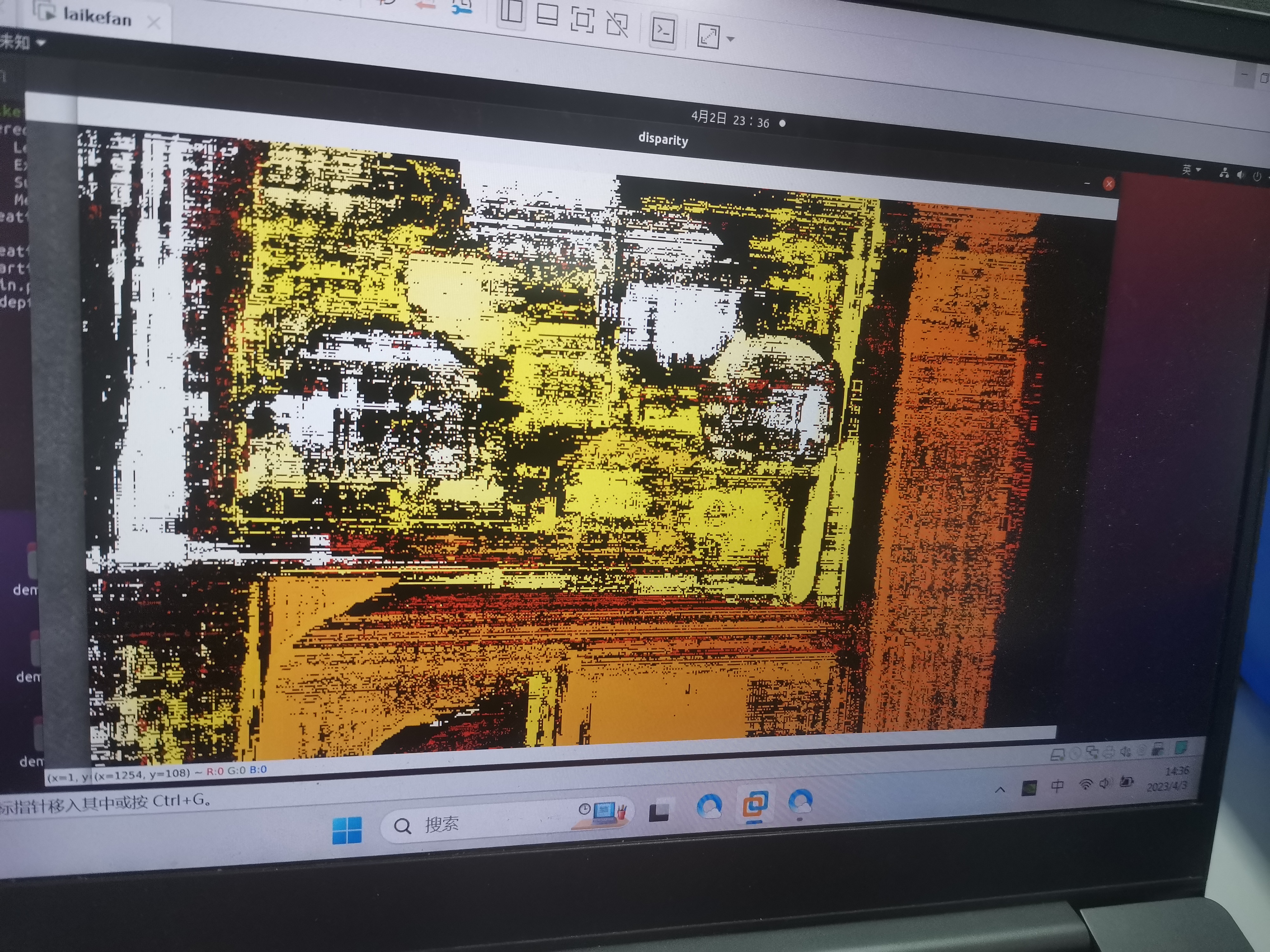
分享最近在使用oak相机做物体抓取项目,需要得到物体场景点云。在ROS话题中订阅得到的点云为下图所示
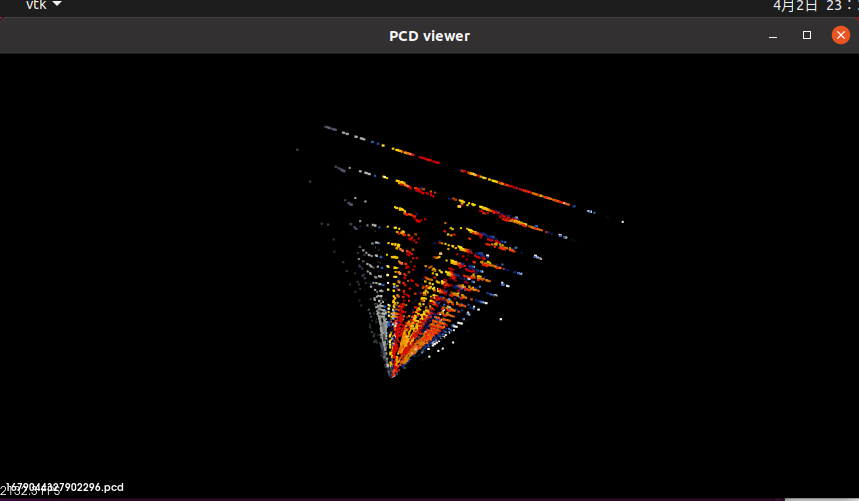
该点云无法呈现出真实场景,在查看oak的官方文档后,发现在depthai中的实例gen2-camera-demo可以生成需要的点云。如下图所示:
但目前没有找到可以将该点云数据保存下来的方法。(之前官方的回答是查看open3d文档中的open3d.io.read_point_cloud函数,但不知在该实例中如何使用)
请问有没有具体的方法保存这个实例的点云数据呢?


