



409
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享原理:气爪是基于气压控制的机械夹爪,其原理是通过控制气体的流动和压力来调节夹爪的开合程度和紧密度。
气爪组件组成:气压控制系统(气泵、气缸、气管(压缩空气供气口)、气控阀(电磁阀))、夹爪、调速机构、磁性开关等部件组成。
结构如下示意图所示:
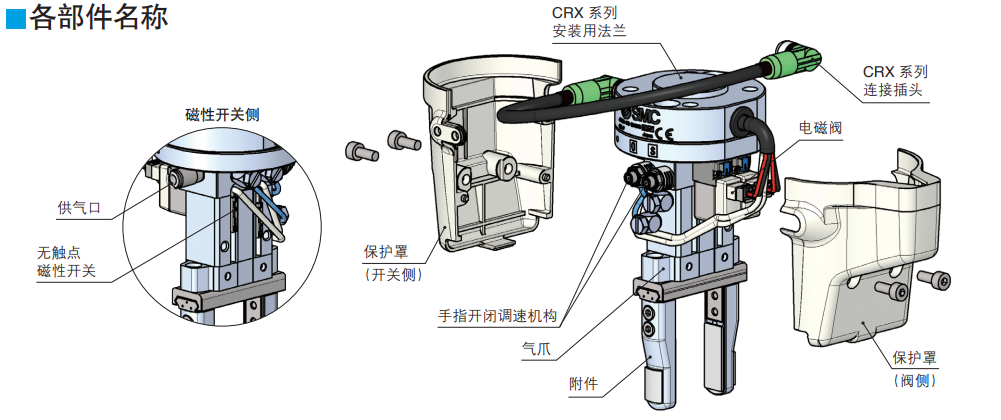
图1 目前使用高精度导轨可做到的重复精度 ±0.01 mm(SMC-JMHZ2-X7400B-CRX)
夹持力大小
和夹持点、使用的气压有关,例如如下的示意图所示描述了不同夹持点、气压下单根手指夹持力的大小关系

图2 不同夹持点、气压下单根手指夹持力的大小关系
应用:
1)自动装配:机器人气爪可以用来抓取和组装零件,从而实现自动化装配生产线。
2)分拣和包装:机器人气爪可以用来抓取不同形状和大小的物品,进行分类和包装。
3)搬运和堆垛:机器人气爪可以用来抓取和移动重量较大的物品,从而实现自动化搬运和堆垛。
4)焊接和切割:机器人气爪可以用来抓取和移动需要进行焊接和切割的工件,从而实现自动化焊接和切割。
5)检测和测试:机器人气爪可以用来抓取和移动待测试的产品,从而实现自动化检测和测试。
6)医疗器械制造:机器人气爪可以用来抓取和移动医疗器械和器件,进行自动化制造和生产
