



409
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享减速原理:利用柔性工作构件的弹性形变进行运动或动力传递的一种新型传动方式,驱动轴的运动通过轮套转移能量到输出轴,从而实现减速。其中的驱动轴(驱动轴是输入轴,通常连接到电机)、轮套(由柔性齿轮和刚性齿轮等组成,实现传动)和输出轴(减速器输出的轴,通常连接到机械设备)。突破了机械传动采用刚性构件机构的模式,使用柔性构件来实现机械传动,由于柔性构件的变形过程基本上是一个对称的谐波因此得名。除苏联把这种传动称为波形传动或柔性轮传动外,美、英、 德、日等国均称为谐波传动。
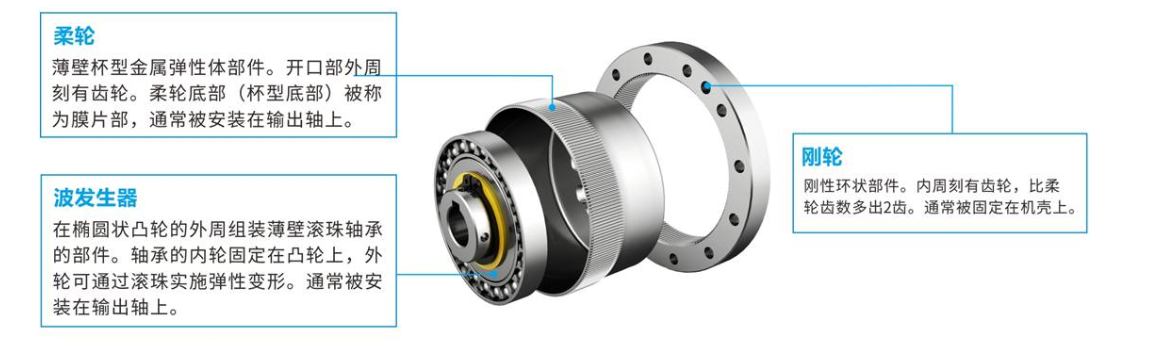
谐波减速器构成:波发生器、柔轮、刚轮
当波发生器工作时内外齿轮之间的转速差产生了变形(产生谐波波形),柔轮(可控弹性变形来实现运动和动力传递的)作为传动元件,能够缓冲和消除这种变形,同时将扭矩传递给刚轮。刚轮通过与输出轴的咬合,将扭矩传递到输出轴上,实现减速效果。
谐波减速器
特点:
1)高精度(传输误差小于等于30弧每秒)
2)体积小
3)高减速比,在1:160以上
4)低回差:谐波减速器具有低回差特性,其输出轴在停止运动时不会出现反向旋转,因此适用于需要精细控制的场合
参考:
【1】http://www.hansmotion.com/list-9-1.html
