


58,025
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
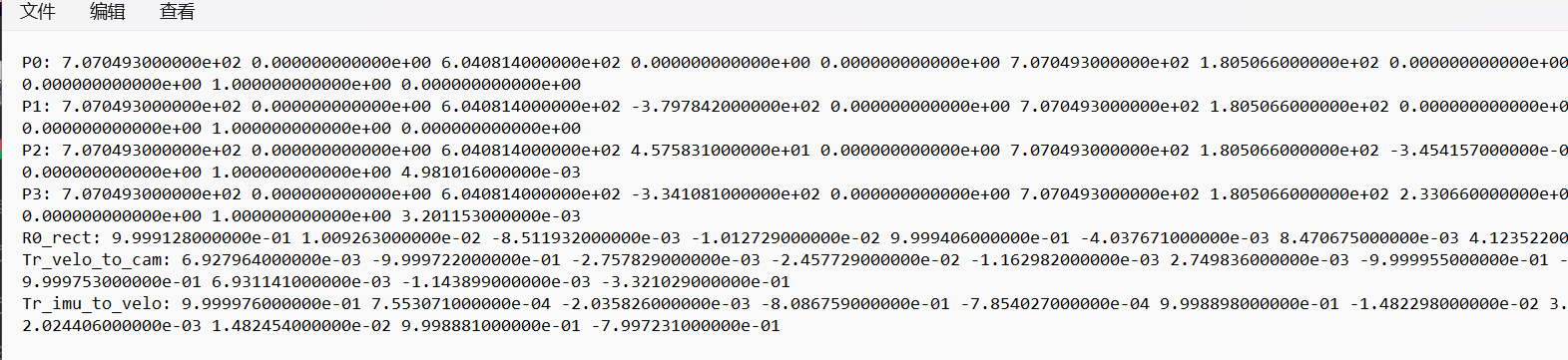
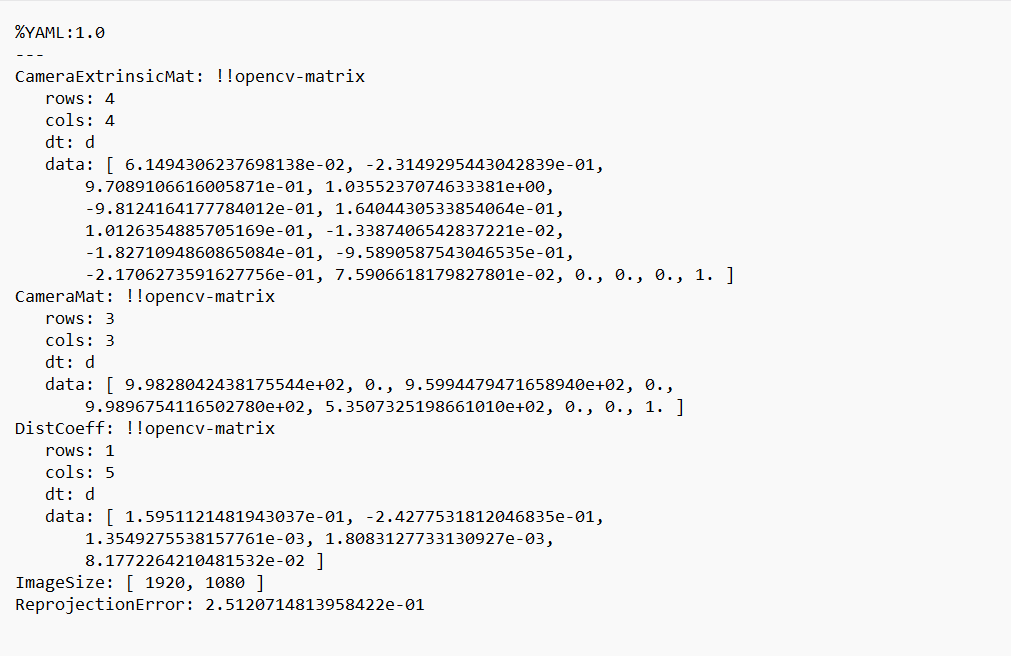
分享autoware联合相机和激光雷达得到了标定文件,里面是相机到雷达的外参,相机畸变参数,相机内参。想转化为kitti里面的calib那种。如何转化?有一点想法,P0是相机内参,是矫正畸变后的内参,使用cv2.getOptimalNewCameraMatrix(CameraMat, DistCoeff, ImageSize, alpha=0)来求,有相机到雷达的外参,kitti的calib是雷达到相机,故对CameraExtrinsicMat标出来的外参求逆。不知道对不对,有会的朋友些欢迎留言,交流后能用,也肯定会意思一下的!

最近也遇到这个问题,请问您这边转换过了吗?需要如何操作?



