

1,143
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
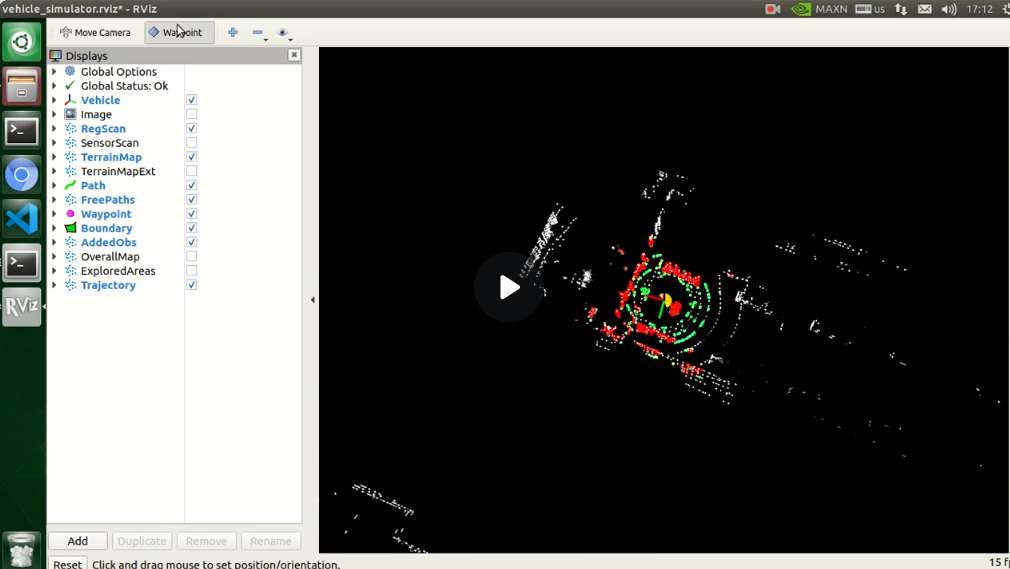
分享各位大佬好,我现在已经把autonomous环境部署到我自己的小车上了,现在的情况是VLP16+lego-loam,现在遇到一个问题:当我运行环境之后,小车周围的terrain map还比较正常,如下图所示
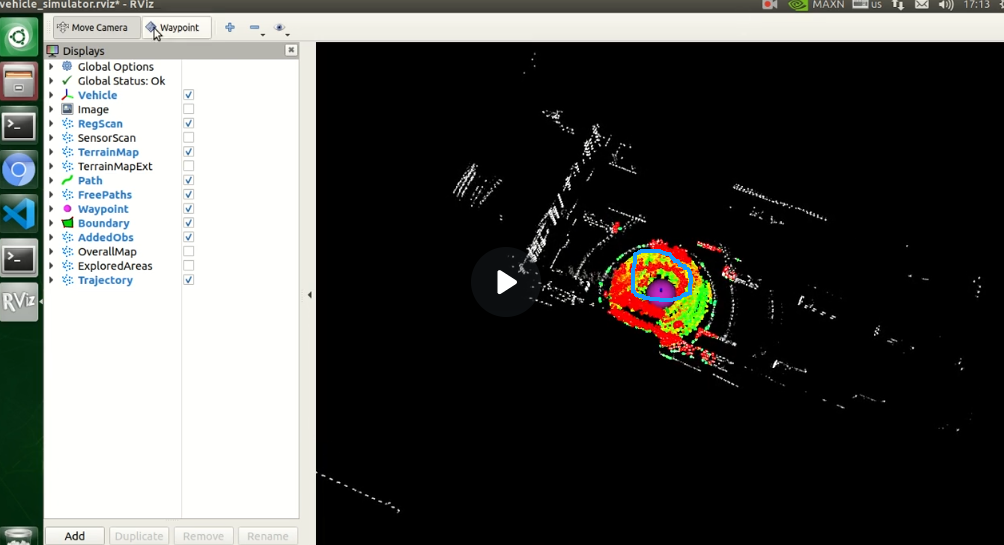
但是在行进过程中terrain map就开始不正常了,比如下面这张,很明显可以看到小车周围多了一圈红色的痕迹,这个是我自己的动态痕迹,因为我绕了一圈去查看小车上的电脑屏幕。
再之后terrain map的红色就包围了小车,因此小车无法找到出路,原地打转
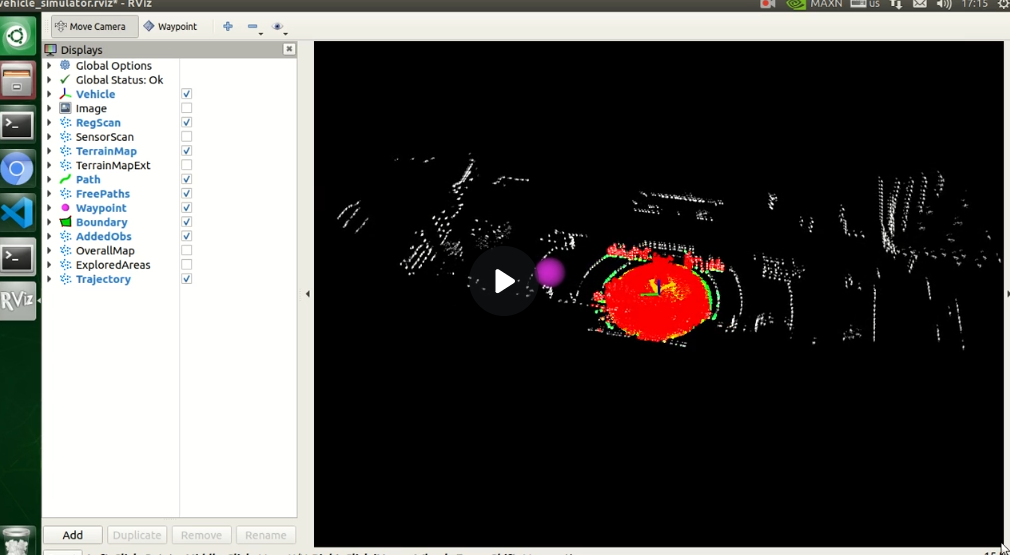
想请教一下大佬,这种情况是什么原因造成的呀,还有就是该如何修改其中的代码才能消除这种情况。谢谢大家!

您好,请问部署legoloam的话还需要对tf做修改吗?还是说直接按照文档里将点云话题修改了就好?



我也在做这个部署实验,方便跟博主聊聊吗

我也遇到过这种情况,如果让小车停下来地形图会恢复吗,如果恢复了说明是地形图更新太慢了,可能是特征点太多导致的,如果还是都是红色有可能是点云和地形图的坐标系没有统一,再或者可能是小车本体的缘故,需要去除小车周围的点云。
