


1,365
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享目录
前言
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人研制上也得到了广泛的应用。本文主要介绍HC—SR04超声波测距的原理及其在89c51单片机上的应用。
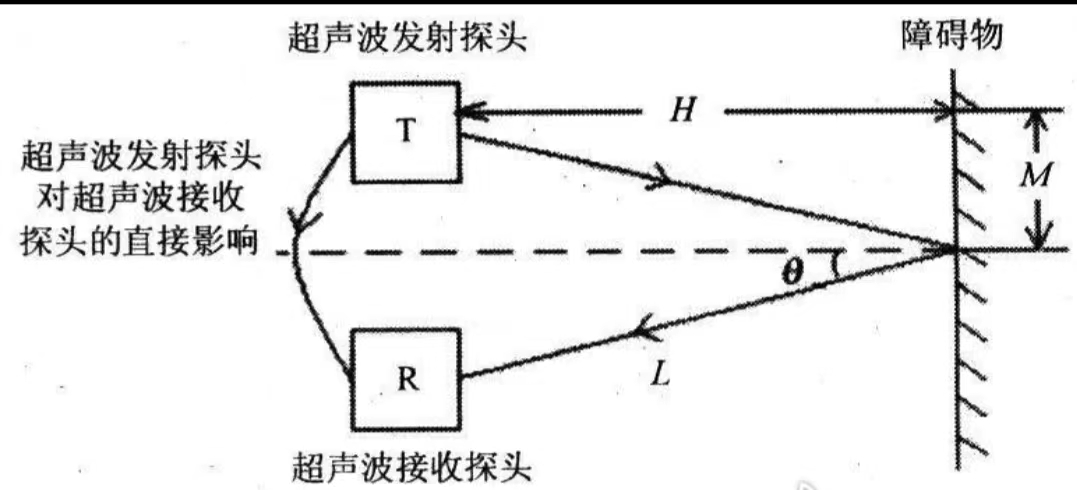
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 。这就是所谓的时间差测距法。
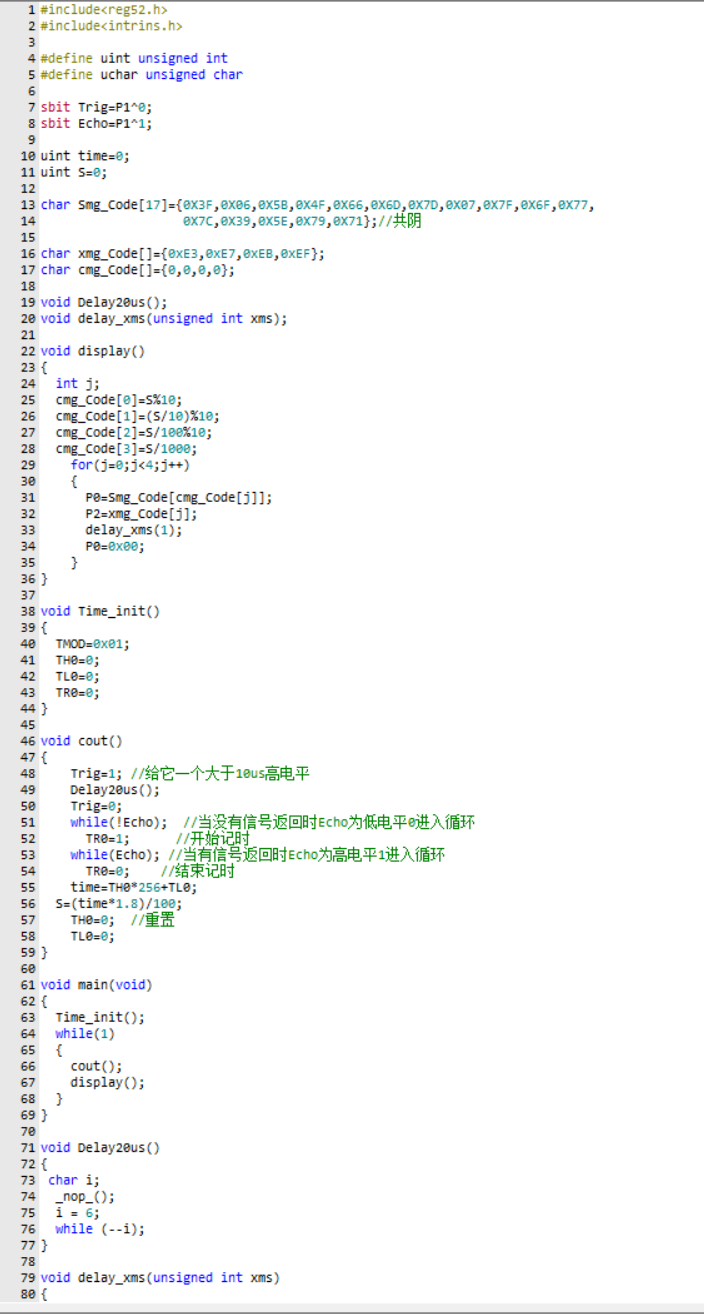
1.采用单片机I/O口TRIG触发测距,必须给定10us以上高电平。
2.模块自动发送8个40khz的方波,自动检测是否有返回方波。
3.有信号返回I/O口ECHO输出一个高电平,高电平持续的时间(用定时器进行定时)就是波从发射到返回的时间。测试距离=(高电平时间 x 声速(340m/s))/2;
1.I/O口给TRIG应该10us以上的高电平。

2.有信号返回I/O口ECHO输出一个高电平

1、正常的计算距离的公式
测试距离=[ 高电平时间 x 速度(340m/s)/2 ](除以2表示,从发出到接收)
测量单位:测量距离(米)、速度(米/秒)、高电平时间(秒)
2、将单位改变后的测距离的公式
测试距离=[ (高电平时间us/1000000)x 340 / 2 x 100 ] =高电平时间us/58
测量单位:测量距离(厘米)、速度(厘米/秒)、高电平时间(微秒)
1、HC-SR04超声波发出8个40KHz的方波,然后再遇到障碍物通过ECHO给单片机返回一个高电平,从触发HC-SR04工作开始计时,到ECHO返回高电平停止计时,这段时间计为t;
2、然后通过公式就可以算出此时的距离s;
随着科学技术的飞速发展,超声波在生产、生活中的应用范围越来越广。目前,离生活最近的超声波应用就是测距。如泊车辅助系统、智能导盲系统、移动机器人等距离测量都会用到超声波测距。同时,超声波测距技术还能够实现对障碍物距离的精确测量。
