



1,365
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享一、引言
在现代嵌入式系统中,定时/计数器中断是一项非常重要的功能。它能让我们精确地控制程序的执行时间,实现多任务处理,提高系统的资源利用率。在本文中,我们将深入探讨定时/计数器中断在软件编程中的应用,并通过实例分析,让您轻松掌握这一技术。
二、定时/计数器中断基本原理
1.定时器:定时器是一种能够按照设定的时间间隔产生中断的硬件设备。它通常包含一个计数器,用于记录时间间隔。当计数器达到预设的值时,会产生一个中断请求,通知CPU执行中断服务程序。
2.计数器:计数器是一种用于记录事件发生次数的硬件设备。它通常包含一个触发器,用于检测事件。每当事件发生时,计数器会将触发器的值加一。当触发器的值达到预设的值时,会产生一个中断请求,通知CPU执行中断服务程序。
3.中断:中断是指CPU在执行程序过程中,接收到外部设备发来的请求,需要暂停当前任务,去处理这个请求。处理完请求后,CPU再返回到原来中断的位置继续执行。
三、定时/计数器中断编程实例
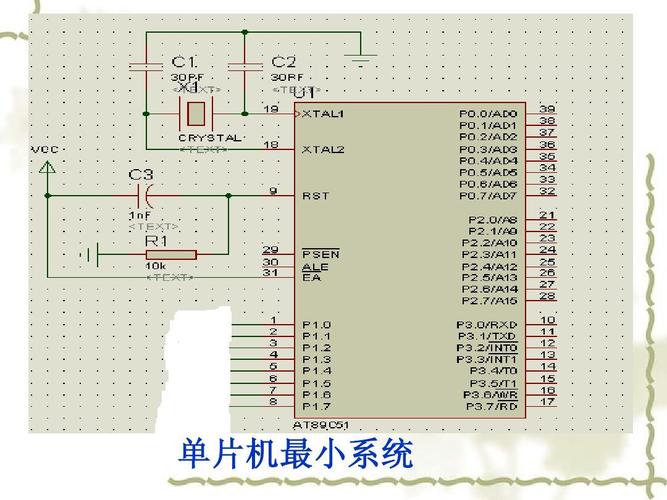
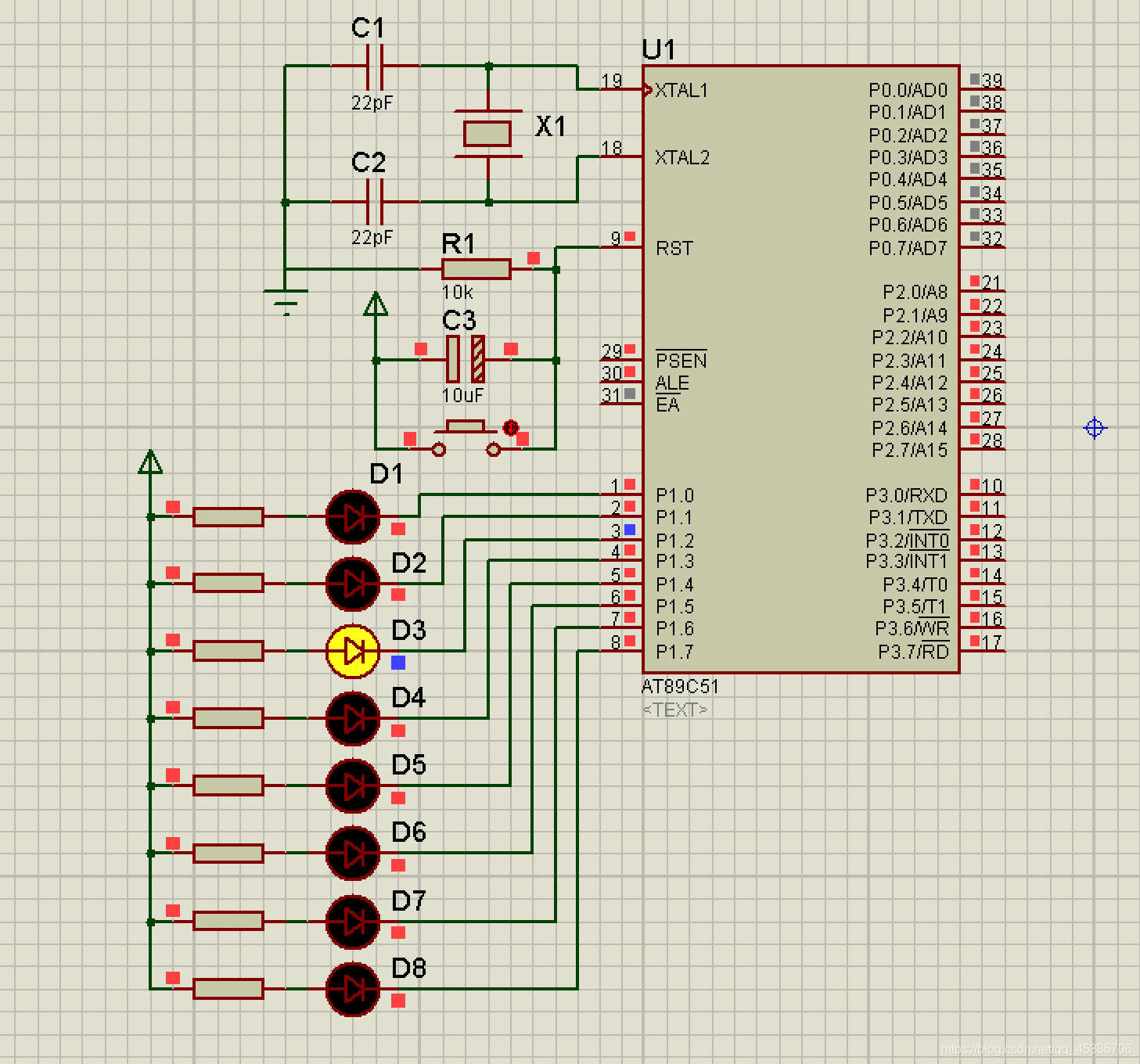
以下是一个基于8051单片机的定时器中断编程实例:
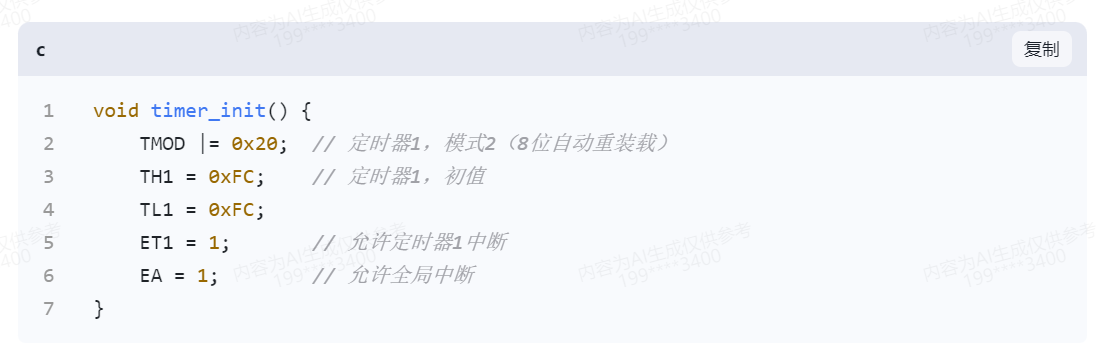
1.定时器初始化
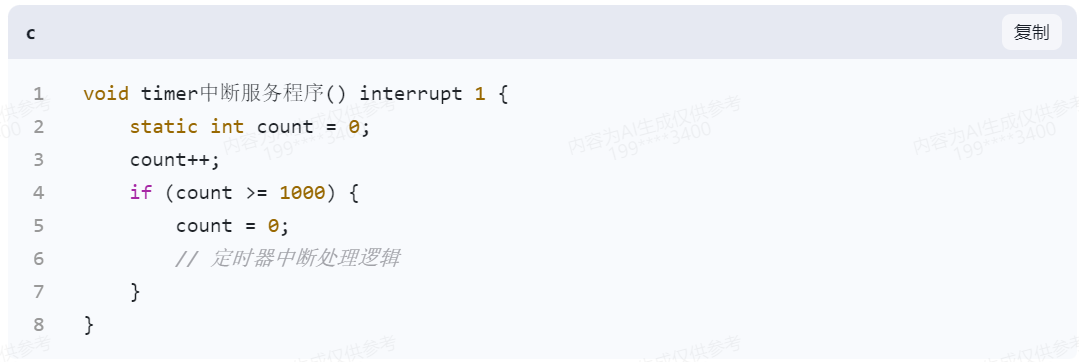
2.定时器中断服务程序
3.主函数
四、总结
通过以上实例,我们可以看到定时/计数器中断在软件编程中的重要作用。它能够帮助我们精确地控制程序的执行时间,实现多任务处理,提高系统的资源利用率。希望本文能够帮助您深入理解定时/计数器中断编程,并在实际项目中灵活运用。
