


1,365
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享这篇文章我们讲解使用51单片机控制LED灯的闪烁。那么为了方便理解,我们要从最基础的讲起。闪烁,就是灯一会儿亮一会儿灭,这个一会儿就是时间间隔,也就是今天我们说的延时了。比如灯亮1s,再灭1s,循环往复就是闪烁。
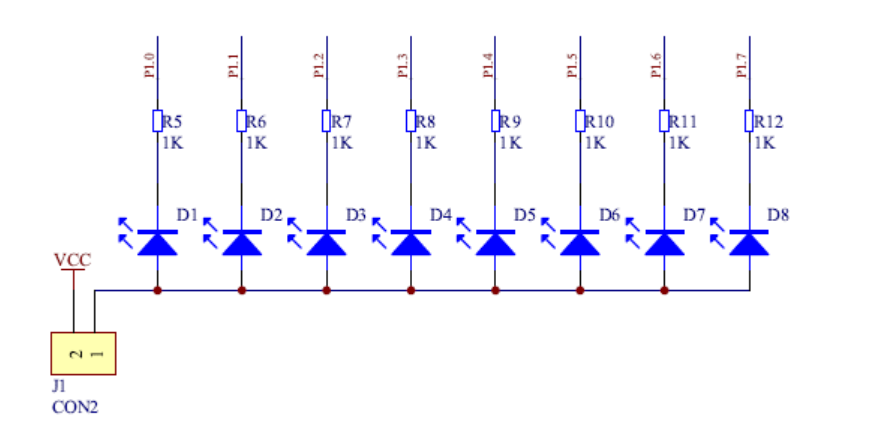
那么首先借助原理图,使用LED1进行演示,也就是P1.0。注意:LED是低电平点亮,不了解原因的去看开头引用的文章。

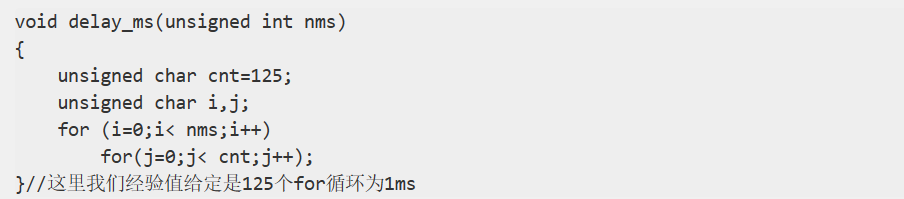
延时函数使用for循环或者while循环,其实就是执行一段空代码,因为每执行一次for或者while循环都要耗费一点时间,这个时间就由指令周期决定,指令周期由时钟频率决定,也就是外部晶振的频率决定。
接下来就是主函数
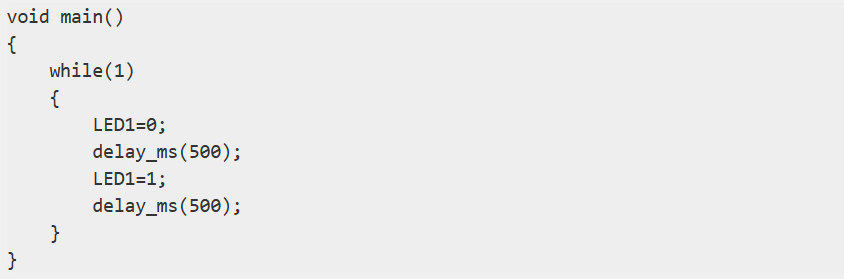
主函数理解就很简单了,在永不休止的循环里面,给LED的引脚P1.0隔段时间赋不同的值,让其一会儿输出高电平,一会儿输出低电平,LED也就随着一会儿灭,一会儿亮了。
