


9,137
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享PX4版本:1.14.0
目标:前进10m
问题:无人船不动,QGC界面中显示为offboard模式
源码:控制逻辑部分
void Boat_pos_control::run()
{
float begin_x;
float begin_y;
float begin_z;
//进入offboard模式并解锁
while(!should_exit())
{
_vehicle_status_sub.copy(&_status);
if((_status.nav_state==vehicle_status_s::NAVIGATION_STATE_OFFBOARD)&&(_status.arming_state==vehicle_status_s::ARMING_STATE_ARMED))
{
PX4_INFO("in offboard and armed");
break;
}
_command.target_system = _status.system_id;
_command.target_component = _status.component_id;
ocm.timestamp = hrt_absolute_time();
_vehicle_local_position_sub.copy(&_vehicle_local_position);
sp_local.x=_vehicle_local_position.x;
sp_local.y=_vehicle_local_position.y;
sp_local.z=_vehicle_local_position.z-5;
sp_local.timestamp = hrt_absolute_time();
_trajectory_setpoint_pub.publish(sp_local);
ocm.position=true;
ocm.timestamp = hrt_absolute_time();
_offboard_control_mode_pub.publish(ocm);
_command.command =vehicle_command_s::VEHICLE_CMD_DO_SET_MODE;
_command.param1=1.0f;
_command.param2=PX4_CUSTOM_MAIN_MODE_OFFBOARD;
_command.timestamp = hrt_absolute_time();
_vehicle_command_pub.publish(_command);
usleep(10000);
_command.command = vehicle_command_s::VEHICLE_CMD_COMPONENT_ARM_DISARM;
_command.param1 = 1.0f;
_command.timestamp = hrt_absolute_time();
_vehicle_command_pub.publish(_command);
}
//记录当前点的位置
_vehicle_local_position_sub.copy(&_vehicle_local_position);
begin_x=_vehicle_local_position.x;
begin_y=_vehicle_local_position.y;
begin_z=_vehicle_local_position.z;
time_tick=hrt_absolute_time();
double target = begin_x + 10;
double distance;
//业务逻辑
while (!should_exit())
{
_vehicle_local_position_sub.copy(&_vehicle_local_position);
distance = target - (double)_vehicle_local_position.x;
if(distance <= 0){}
else
{
ocm.position=true;
ocm.velocity=false;
ocm.acceleration=true;
ocm.timestamp = hrt_absolute_time();
_offboard_control_mode_pub.publish(ocm);
sp_local.x=target;
sp_local.y=begin_y;
sp_local.z=begin_z;
sp_local.timestamp = hrt_absolute_time();
_trajectory_setpoint_pub.publish(sp_local);
}
usleep(100000);
parameters_update();
}
}
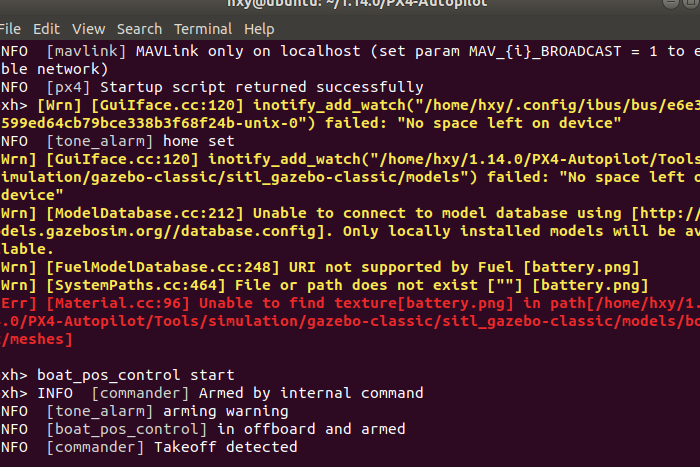
控制台中显示如下:

哥们,有答案了吗


