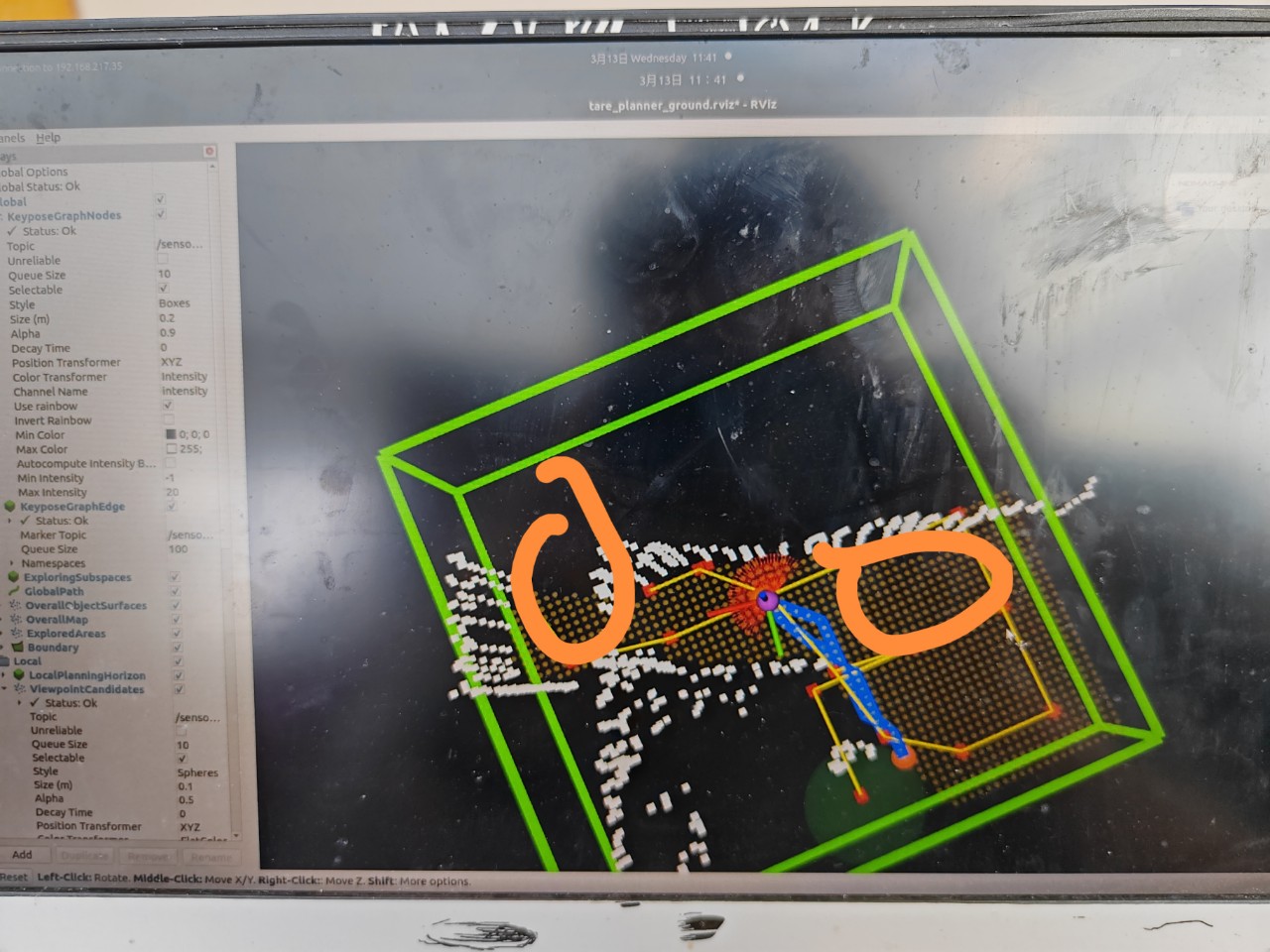
测试环境是楼里的走廊,配置文件用的是修改过的matterport.yam;,启动tare后经常直接就探索结束,或者探索不完全,拐角处的走廊探索不到。比如下图这种情况为什么画圈那些空白区域生成不了viewpoint,低矮墙的里面倒是生成了viewpoint
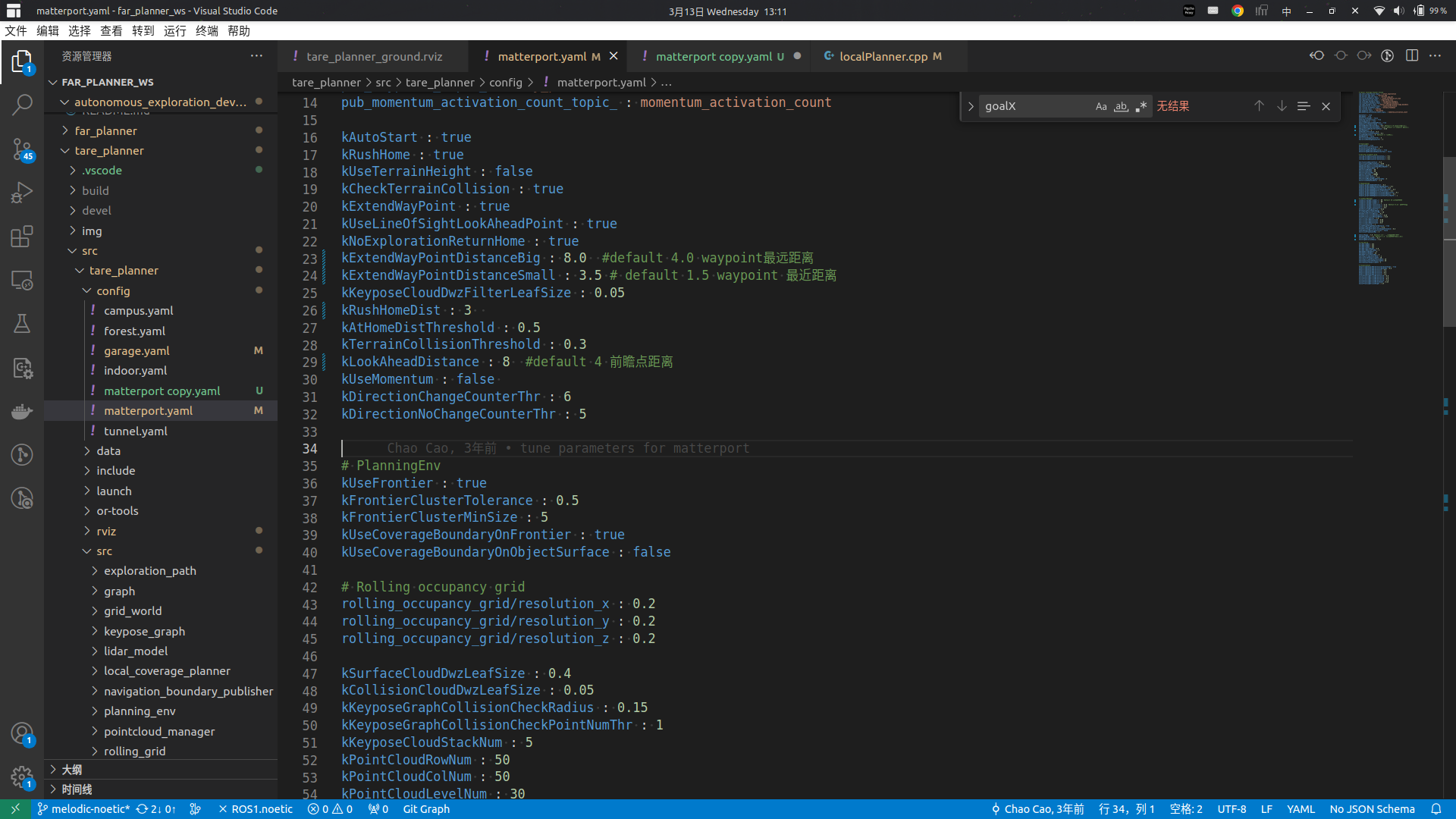
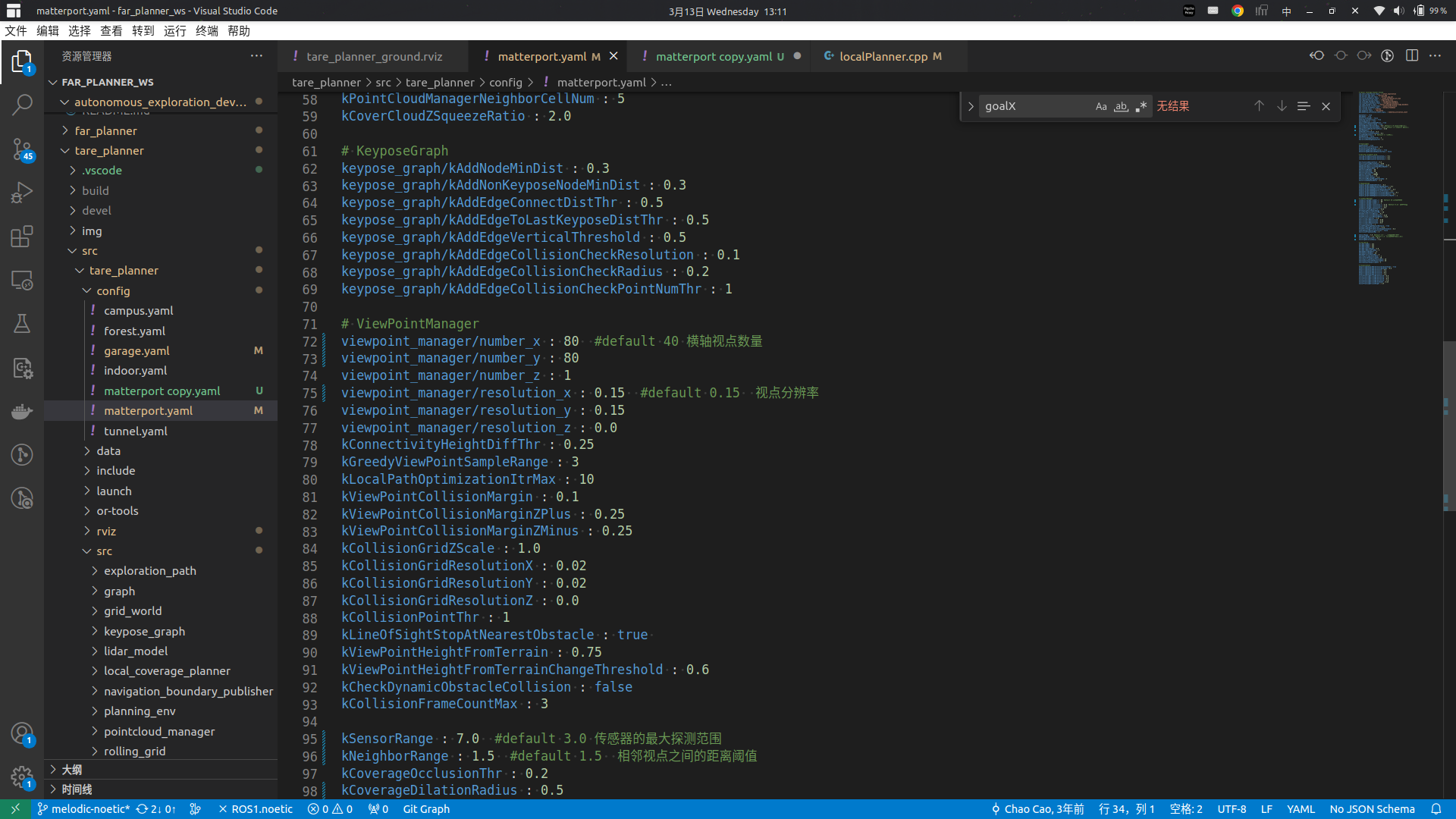
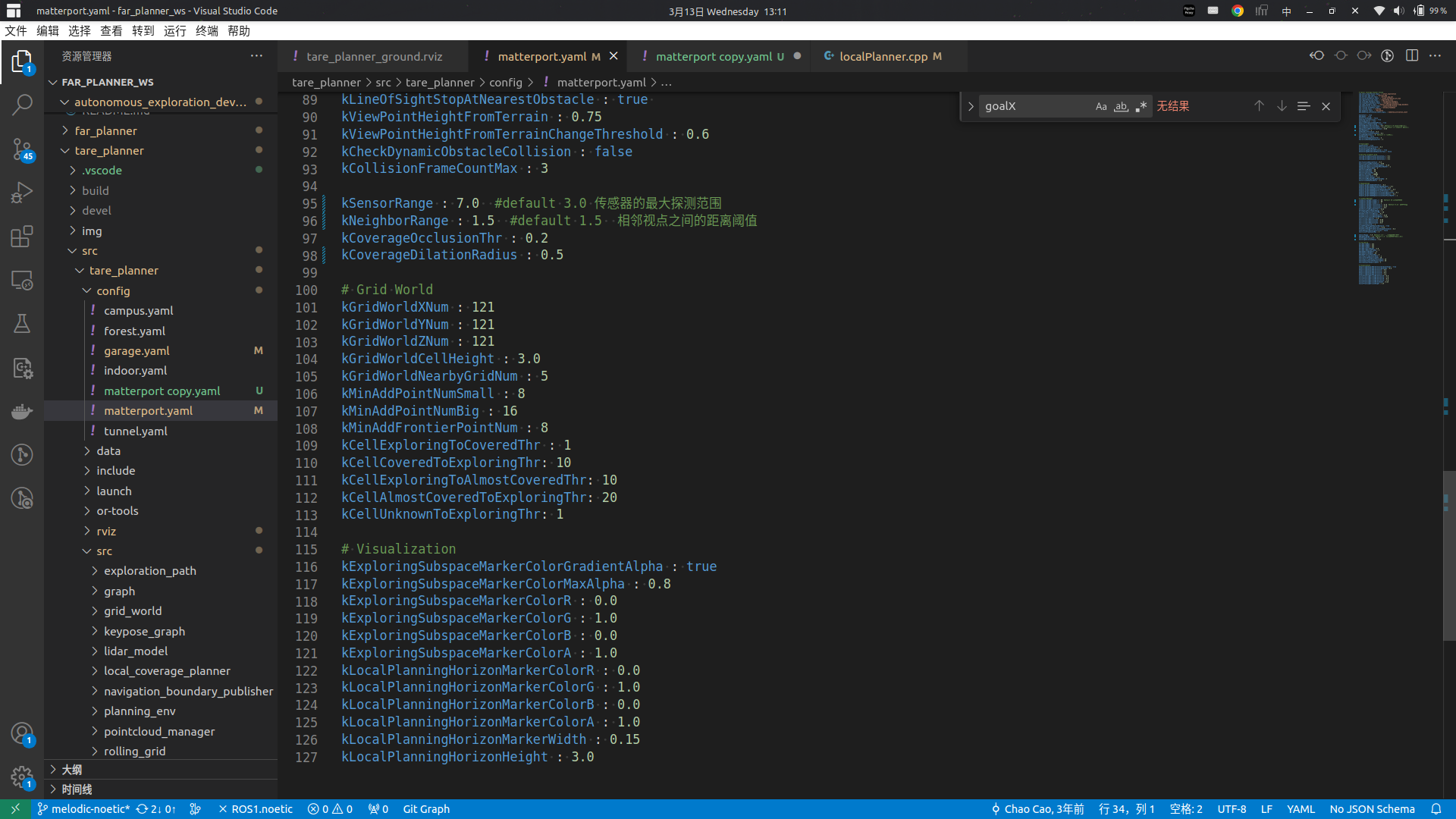
配置参数文件如下
1,143
社区成员
453
社区内容
加载中
试试用AI创作助手写篇文章吧




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享