

1,135
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享我在无人车上部署了tare planner,之前在平地也测试了效果感觉还不错,昨天放到实验楼的走道里想让无人车自主探索走一圈,但是有一段走廊特别长,无人车走了一段距离后就显示探索完成返回了。想问问大佬怎么让无人车能顺利检测到拐角并转弯继续探索啊。谢谢!
-----------------4月5日更新-------------------
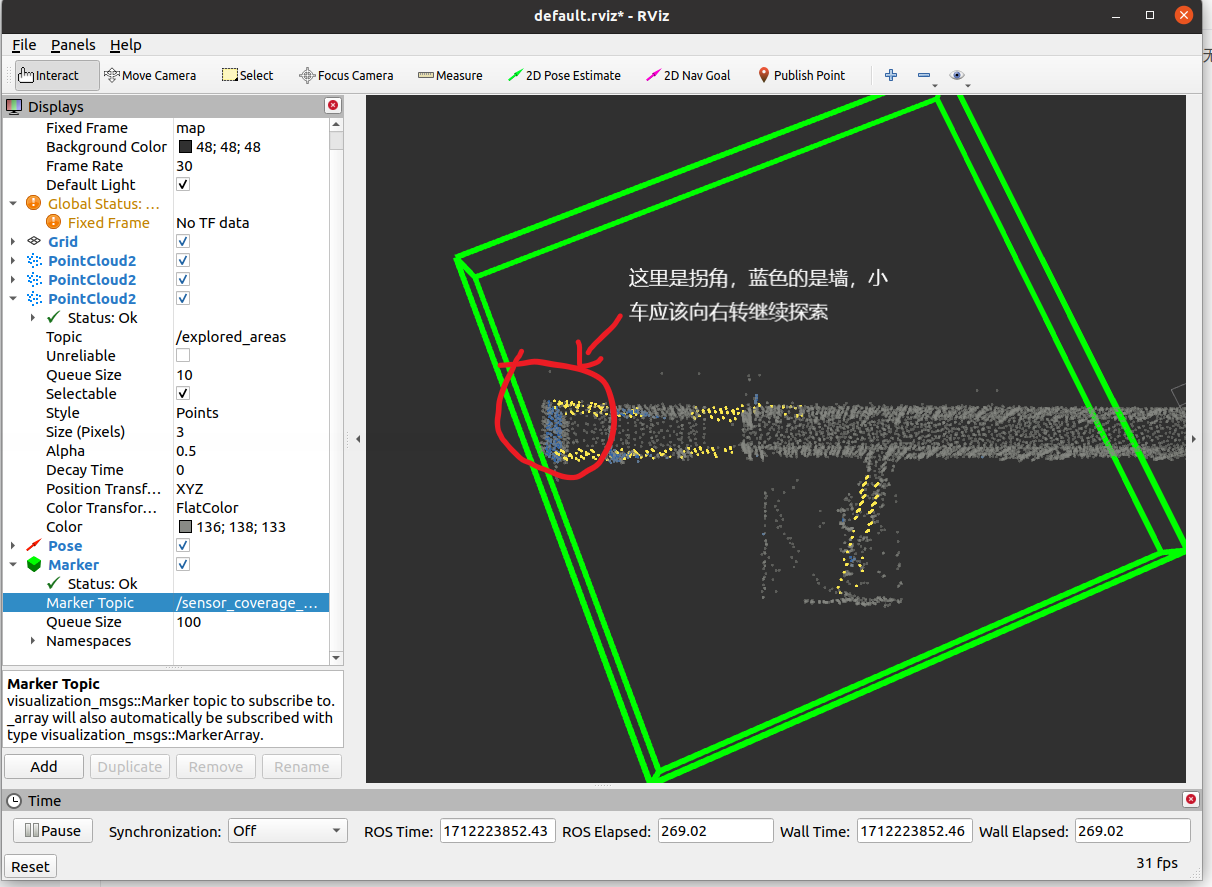
@曹超CMU 曹博具体情况是这样的,如图所示黄色的点是uncovered_frontier_cloud,蓝色的点是uncovered_cloud,小车正常从右边一路向左探索,但是等到图示的情况之后就立刻结束探索返回了。请问这有可能是什么问题呢,谢谢!

我也遇到了同样的问题,请问您最后是调整什么参数解决的,谢谢
你好,只从描述里我无法判断是什么问题,如果可以的话麻烦附上跑tare的Rviz截图。谢谢。

学会了学会了
