



1,145
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享您好,我在小车上部署了完整的tare导航系统,使用indooor参数,在室内进行导航,然后出现了导航不完整的问题,
室内结构如下图

通过rosbag record记录话题发现,未知和自由的边界 以及 待探索表面,这两个驱动导航继续的关键话题的一部分在系统执行一段时间后会突然消失,如下两张图
(红色方块为未探索边界uncovered_frontier_cloud,黄色方格为待探索表面uncovered_cloud)
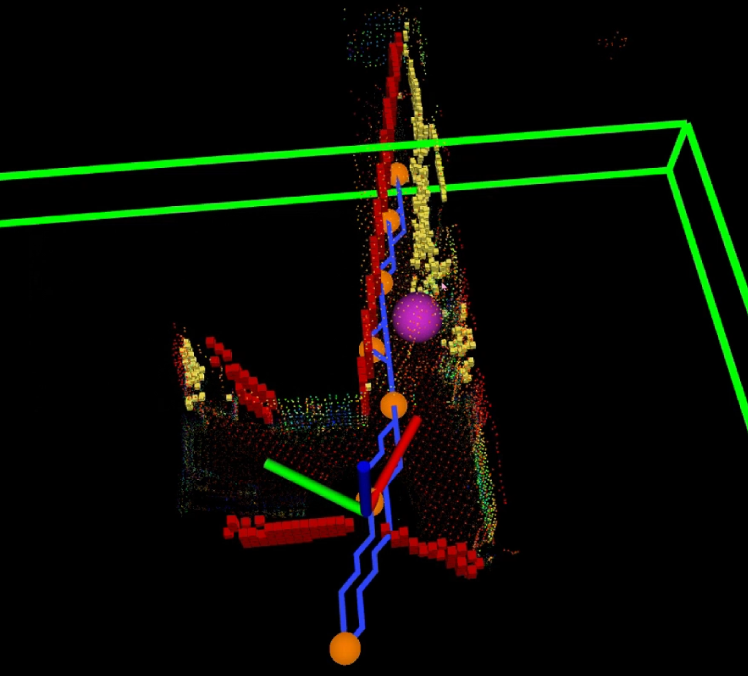

在走到走廊中间,前方拐角处的点云突然绝大部分消失,然后返航,于是没能扫描前方拐角后的空间

后多次实验,有小概率在该拐角没有出现该问题,完成了相对完整的导航 ,并成功返回起点,如下三张图在面对该拐角时的处理情况

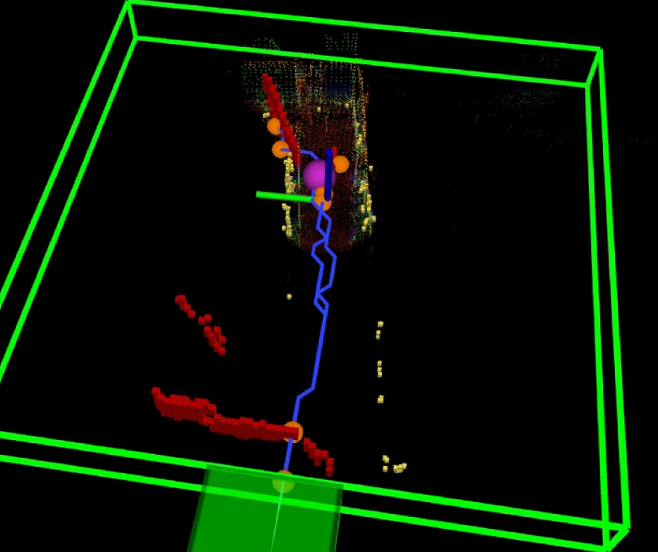

但是其实上面三张图中 中右两张图的下方的未探索边界(红格子)同样出现了消失问题
所以本质就是 未知边界uncovered_frontier_cloud 和 垂直表面uncovered_cloud 提前消失的问题
想请问您在实验中是否遇到过类似问题,或者有没有任何关于这类问题原因的思路?
