社区
软件工程实践-2023学年-W班
作业提交
帖子详情
学无~止境队——5.5冲刺随笔
222100127黄泽钛
2024-05-06 00:11:02
这个作业属于哪个课程
软件工程实践-2023学年-W班
这个作业要求在哪里
团队作业α冲刺
这个作业的目标
α冲刺
其他参考文献
《构建之法》
目录
一.会议照片
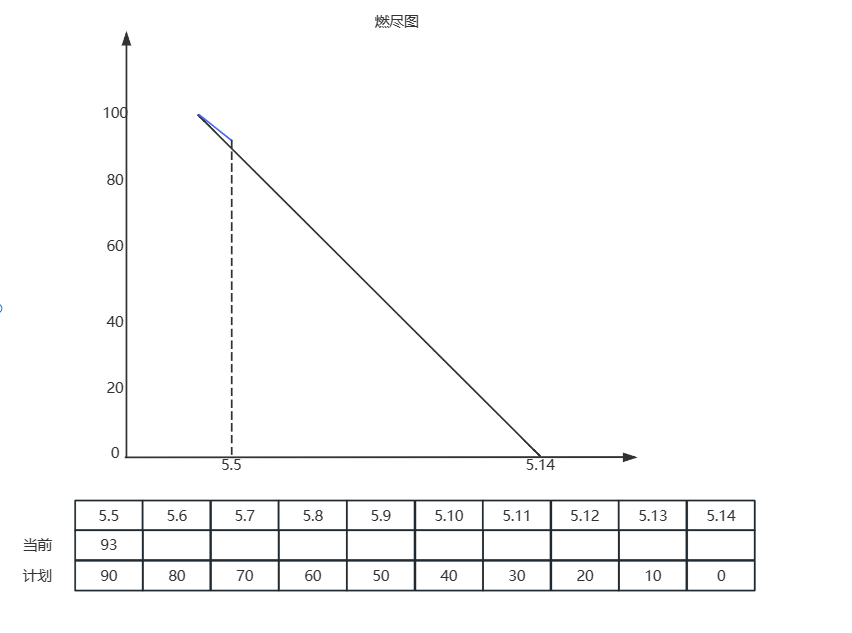
二.项目燃尽图
三.项目运行图
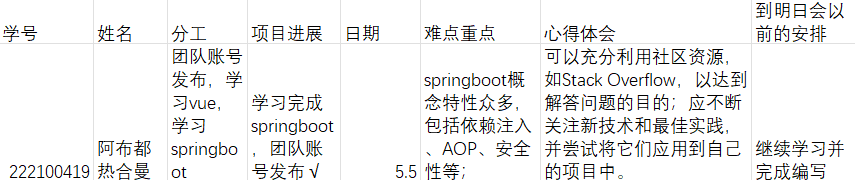
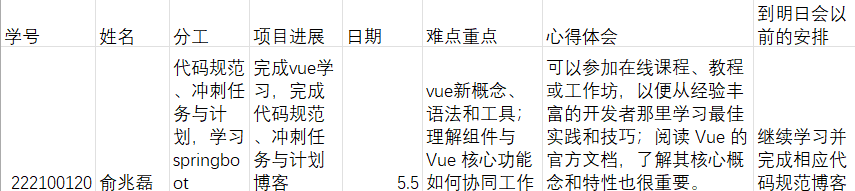
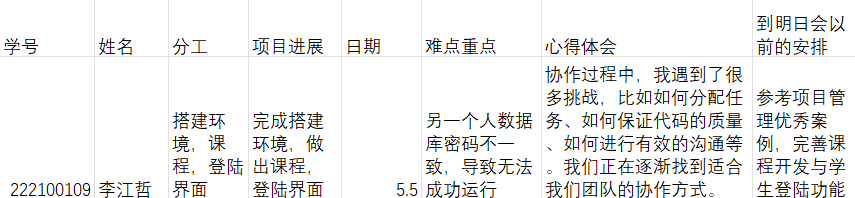
四.成员项目进展、安排、心得
代码提交链接&issue链接
任务分配等表格
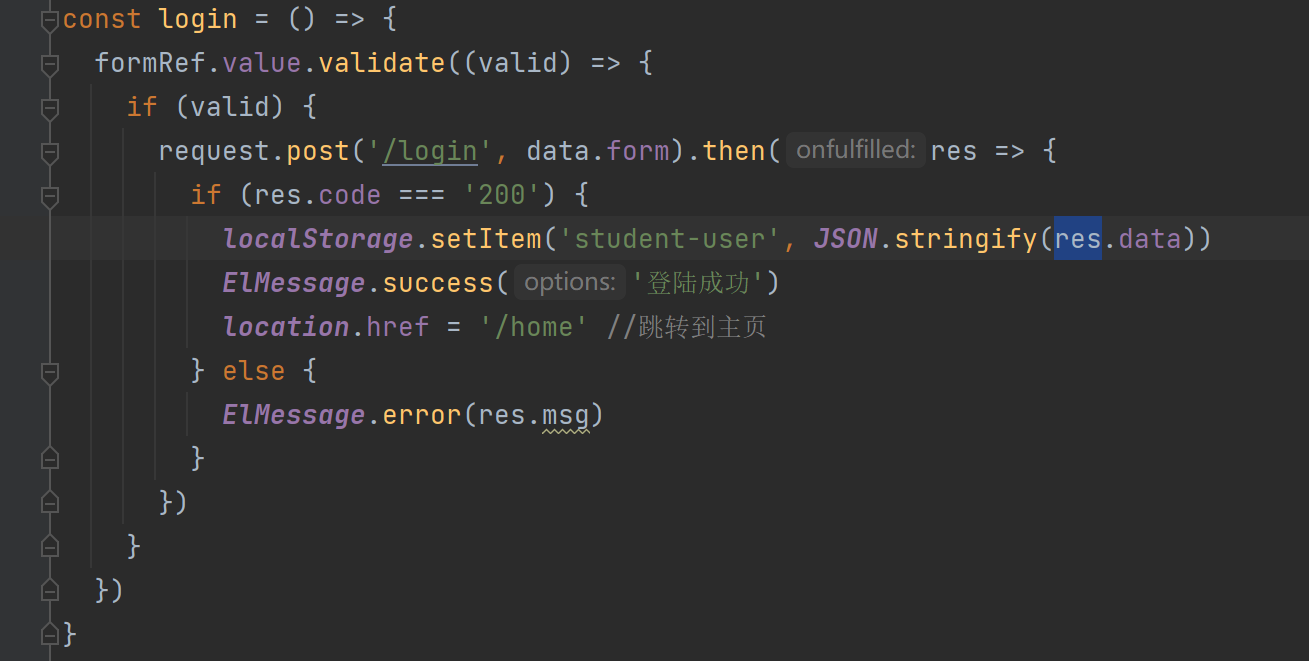
前端验证登录
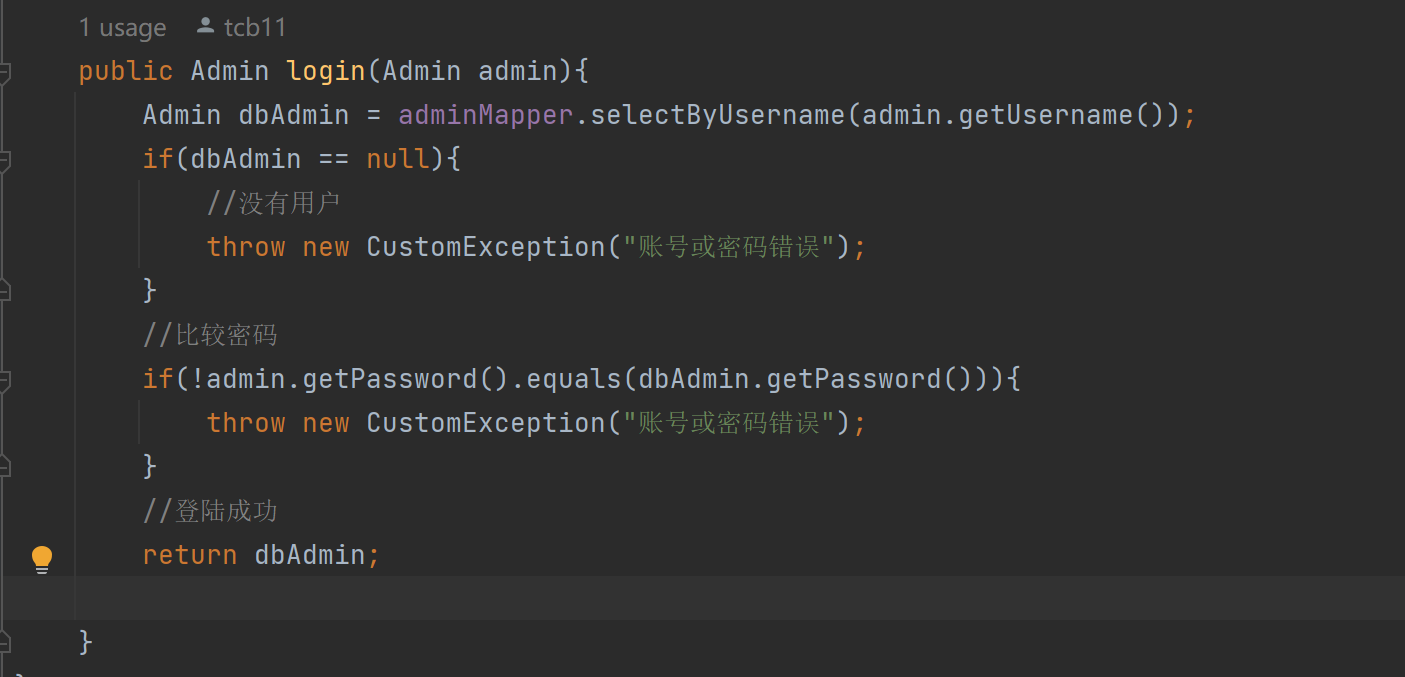
后端验证登录
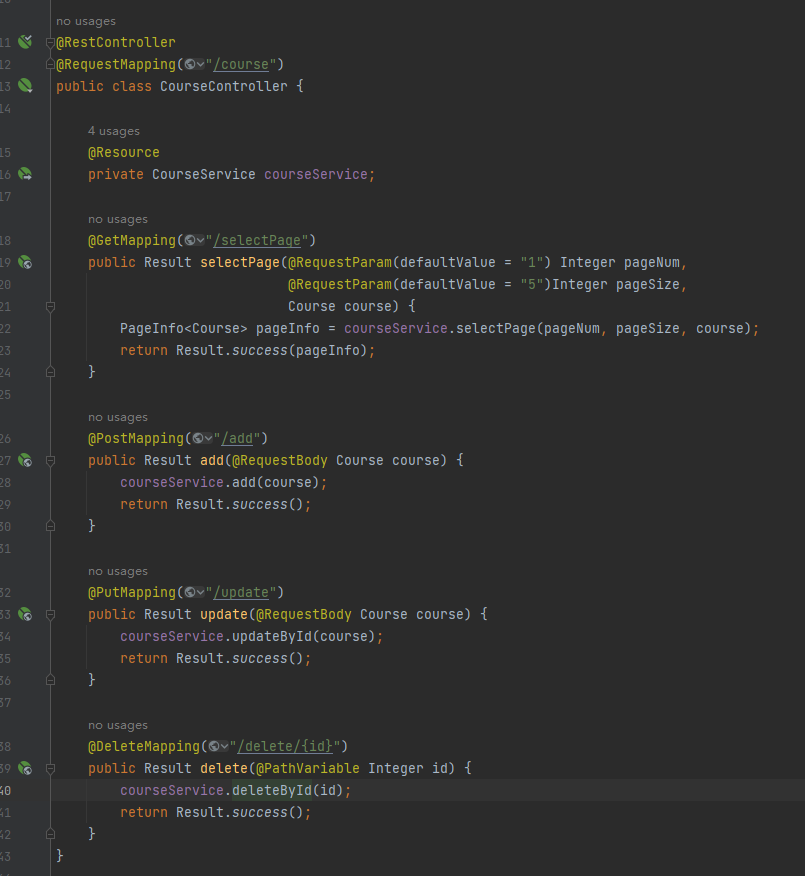
增删改查关键代码
实现分页代码
提交与修改
一.会议照片
二.项目燃尽图
三.项目运行图
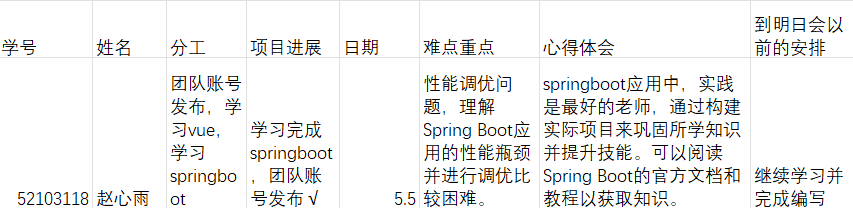
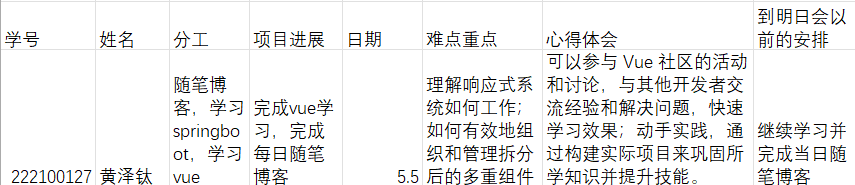
四.成员项目进展、安排、心得
代码提交链接&issue链接
任务分配等表格
前端验证登录
后端验证登录
增删改查关键代码
实现分页代码
提交与修改
...全文
268
回复
打赏
收藏
学无~止境队——5.5冲刺随笔
这个作业属于哪个课程 软件工程实践-2023学年-W班 这个作业要求在哪里 团队作业α冲刺 这个作业的目标 α冲刺 其他参考文献 《构建之法》 目录一.会议照片二.项目燃尽图三.项目运行图四.成员项目进展、安排、心得代码提交链接&issue链接任务
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
基于超局部模型与自抗扰ESO观测器的无模型预测电流控制改进策略研究(Simulink仿真实现)
内容概要:本文围绕“基于超局部模型与自抗扰ESO观测器的无模型预测电流控制改进策略”展开研究,提出一种结合超局部模型(ULM)与扩张状态观测器(ESO)的无模型预测电流控制(MFPCC)改进方法,旨在提升永磁同步电机(PMSM)电流环的动态响应性能与抗干扰能力。该策略利用超局部模型对系统行为进行局部逼近,避免依赖精确数学模型,同时引入自抗扰控制中的ESO实时观测并补偿系统内外部扰动,有效抑制参数摄动、负载变化及模型不确定性带来的影响。研究通过Simulink搭建完整的控制系统仿真模型,对传统MFPCC与所提改进策略进行对比分析,验证了新方法在电流跟踪精度、响应速度和鲁棒性方面的优越性。; 适合人群:具备电机控制、现代控制理论及Simulink仿真基础的电气工程、自动化及相关专业的研究生、科研人员及工程技术人员。; 使用场景及目标:①用于高性能电机驱动系统中电流环控制器的设计与优化;②为无模型控制与自抗扰控制的融合应用提供技术参考;③支撑相关课题的仿真验证、论文复现与创新方法研究。; 阅读建议:建议读者结合Simulink仿真模型深入理解控制结构与参数整定过程,重点关注ESO的观测性能与扰动补偿机制,并可通过改变负载条件、参数偏差等工况进行鲁棒性测试,进一步掌握该改进策略的核心优势与适用边界。
软件工程实践-2023学年-W班
315
社区成员
832
社区内容
发帖
与我相关
我的任务
软件工程实践-2023学年-W班
福州大学的软件工程实践-2023学年-W班
复制链接
扫一扫
分享
社区描述
福州大学的软件工程实践-2023学年-W班
软件工程
需求分析
结对编程
高校
福建省·福州市
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享