


4,839
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

自2024高通边缘智能创新应用大赛启动以来,全国各地的开发者热情如潮,踊跃报名,其中不乏名企名校开发者,共赴这场科技狂欢盛宴!
随着初赛赛程过半,我们陆续看到一些精彩的创意与技术构想。同时,大家对前沿边缘智能技术的好奇心日益浓厚,对比赛设备的好奇心也持续高涨。
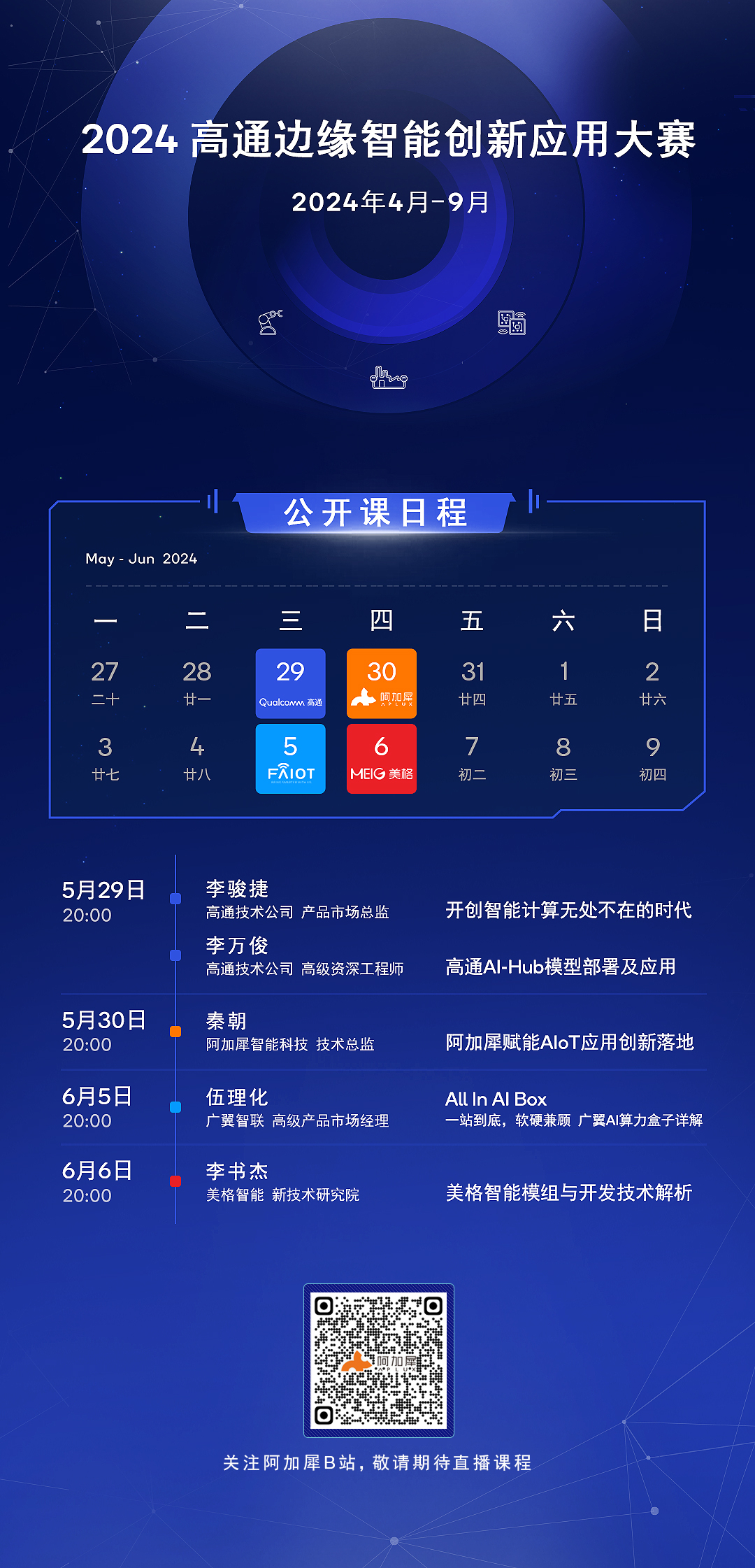
应广大参赛者的强烈呼声,结合赛程既定安排,今天我们正式通知大家——一系列精彩纷呈的赛事公开课将于5月29日起重磅来袭!
来自高通技术公司、阿加犀、广翼智联及美格智能的行业大咖们将空降直播间,带来最潮技术解析,一起脑洞大开探讨创新应用的N种可能,比赛设备的神秘面纱也将被抢先揭开!
直播日历新鲜出炉,赶快码住,预约不迷路!
诚邀广大参赛者及科技爱好者扫码关注,一同探索边缘智能的无穷魅力,拓宽思维视野,点燃创意火花!

