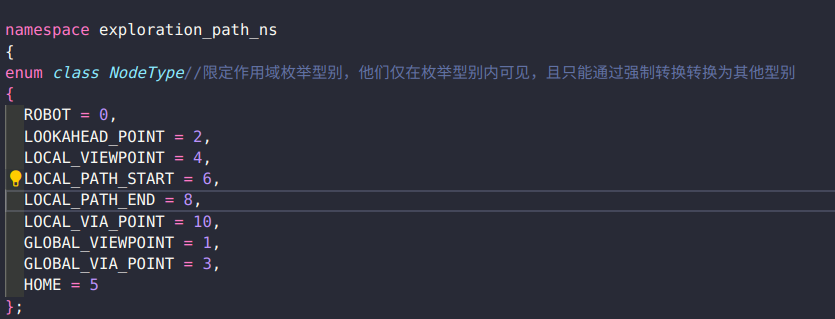
特别是LOCAL_VIA_POINT、LOOKAHEAD_POINT和LOCAL_VIA_POINT,是怎么判别的?节点实现已经有了LOOKAHEAD_POINT的type后续为什么还要在判断lookahead_point?
1,143
社区成员
453
社区内容
加载中
试试用AI创作助手写篇文章吧



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享