


1,150
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享不知道是不是因为我现在的far-planner中default参数有问题会导致V图变化比较奇怪,我将先验地图的点云与激光雷达的实时数据融合,希望实现在已知地图导航,第一次刚开far-planner根据先验地图会生成 这样的图(生成的V图和预期有一些差异,我也不知道是不是参数的问题)

,随着机器人运动,V图会发生变化,先验地图上的障碍物都会消失,理论上每次进入terrainAnalysisExt中的laserCloudHandler后我都会将先验地图和激光雷达数据融合,先验地图的数据不应该消失

,根据地形分析得到的地形数据进入far-planner之后不是会被ExtractFreeAndObsCloud,区别为free和obs么?FARUtil::surround_obs_cloud_数据会经常跳动,由

变为
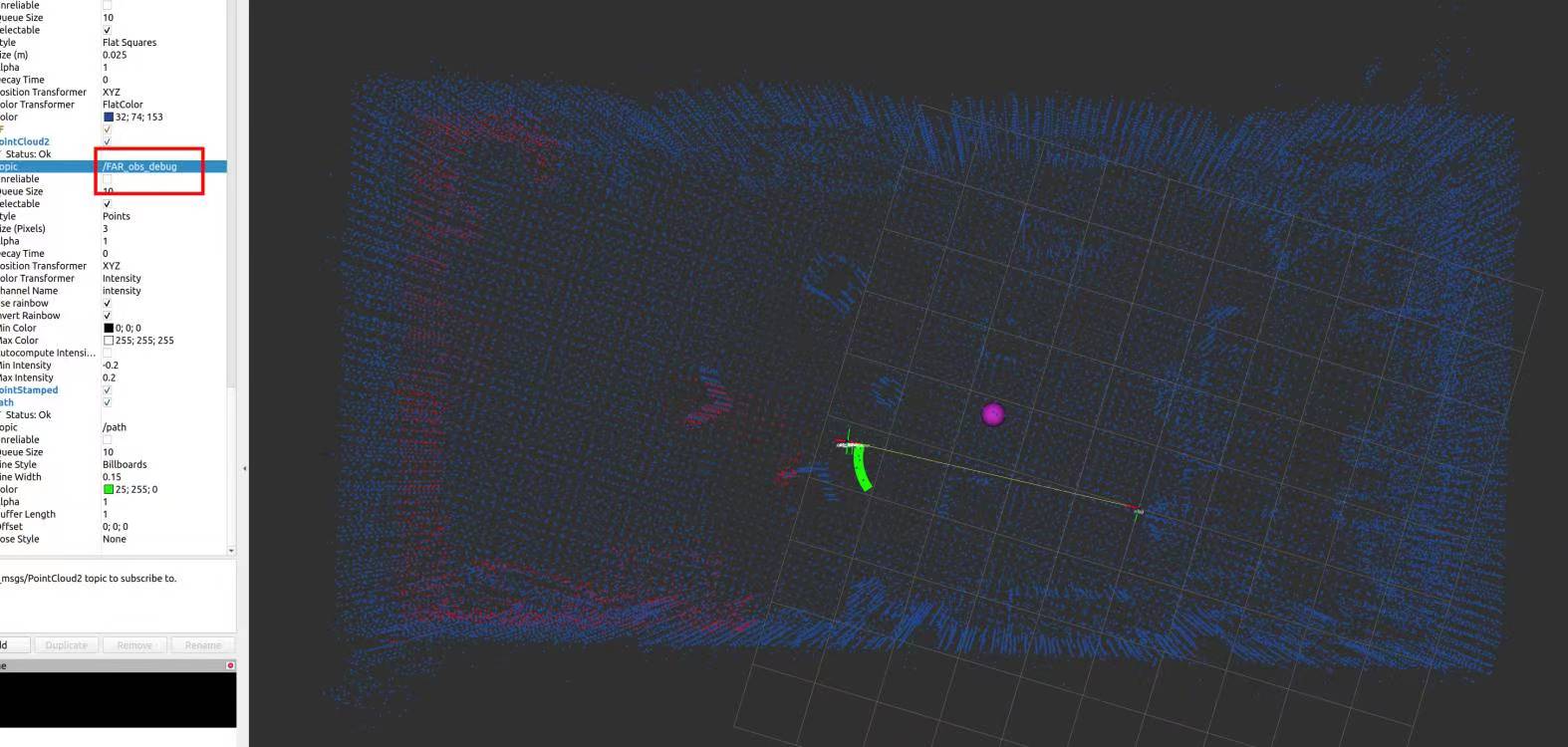
,不知道会对V图造成哪些影响?希望请教一下对于生成V图时候的我所提到的问题

