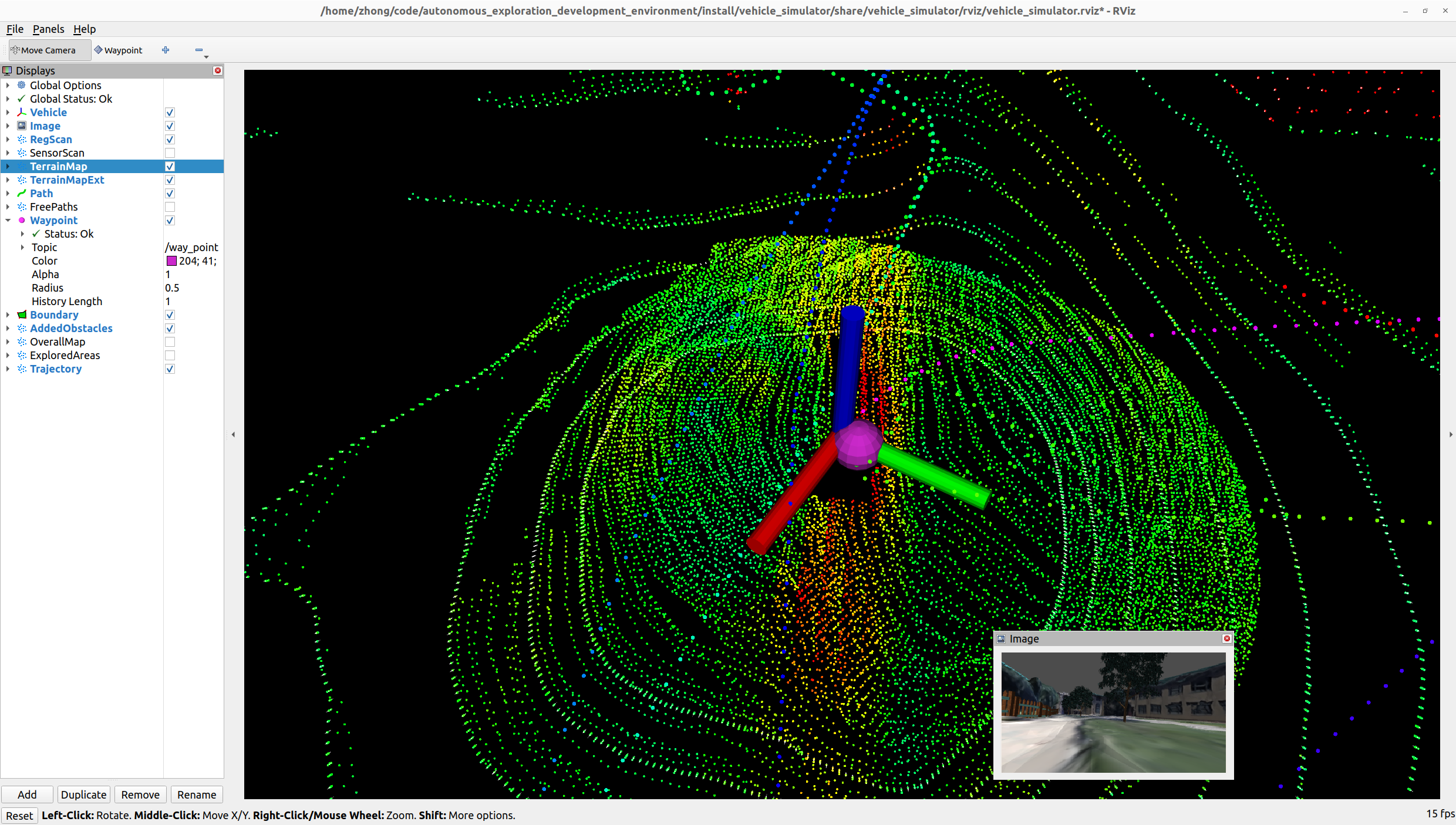
想请教一下大佬们,AEDE在campus环境下仿真下为什么能直接无障碍(很丝滑) 通过地面上有红色点的区域啊???仿真里面不会绕路。。但是部署到实体机器人上面,但凡地面上出现一点红色点云,机器人就会停下来重新规划路径(左右转动)。
miao
1,151
社区成员
453
社区内容
加载中
试试用AI创作助手写篇文章吧





 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享