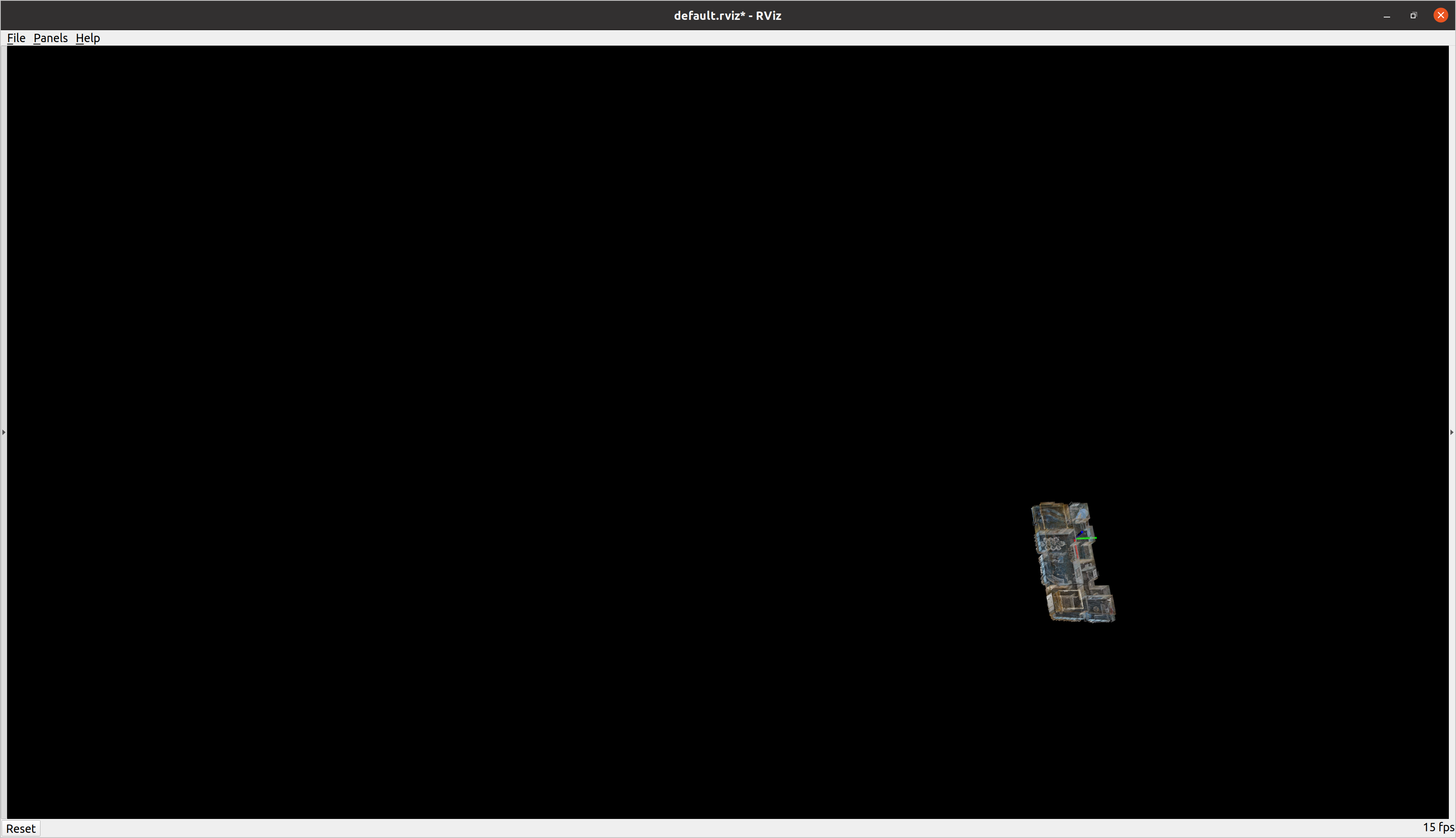
如图所示,各位大佬,rviz的中心坐标轴好像是依据之前的大型地图而不是现有地图,导致整个地图显示有问题,而且在使用tare的时候探索过早结束,请问原因是什么,该如何解决
哥 能交流下吗 我也再做tare
1,151
社区成员
453
社区内容
加载中
试试用AI创作助手写篇文章吧





 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享