

1,150
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享 大家好,由于我的项目有视觉感知需要,所以我准备将tare的仿真环境更换为carla仿真器中颜色纹理更好的仿真环境,我认为这个过程类似一次实车部署。
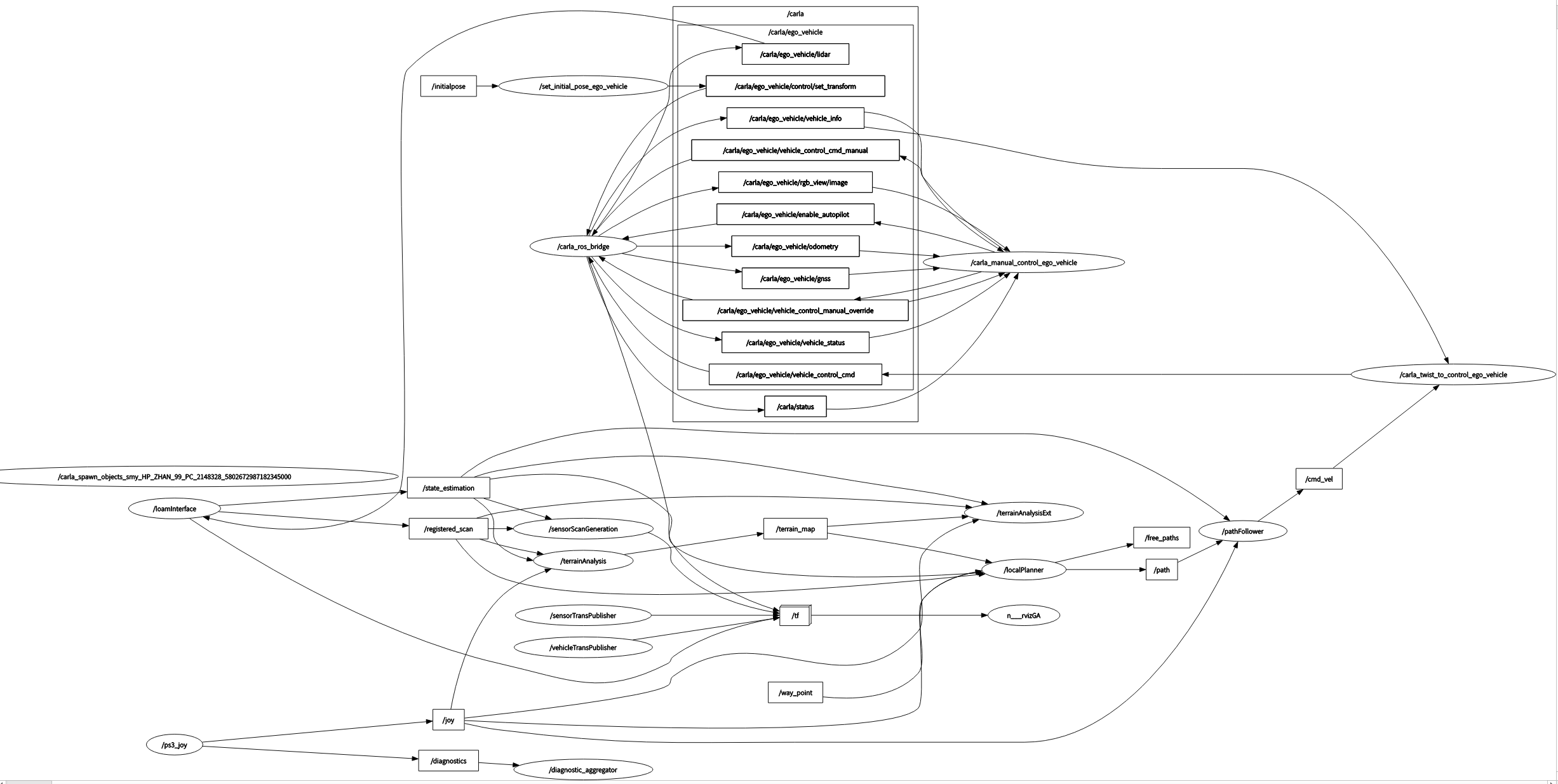
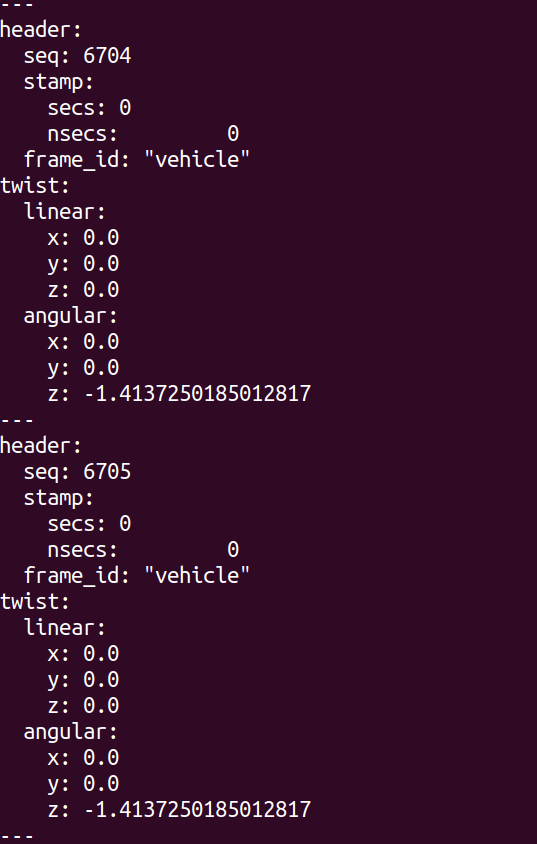
但过程遇到了如下问题,我在给loam_interface节点订阅了相关的原始点云话题/carla/ego_vehicl/lidar之后(PointCloud2消息格式),启动了sysytem_real_robot.launch用rviz发布waypoint之后Localplanner不能进行点到点导航,打印相关话题消息后,/waypoint和/path话题看起来都有正常输出,但打印cmd_vel之后却发现其线速度一直设置为0!!
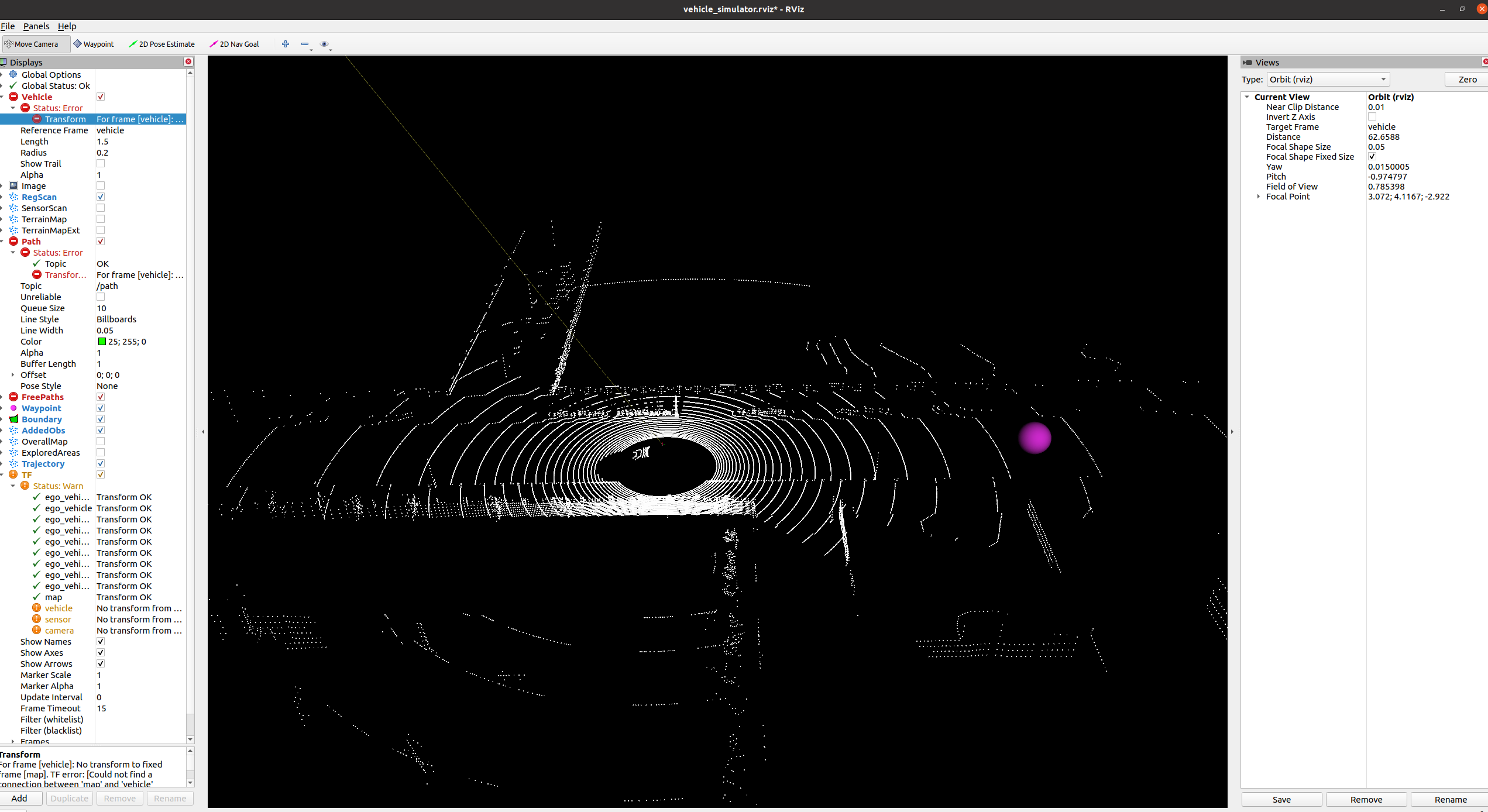
同时我注意到我rviz中的vehicle坐标系好像标黄,报错没有正确的tf,这是不能导航的关键原因吗?path和free_path好像依赖于vehicle坐标系
如果实车部署的话?应该怎样设置好实车车体坐标系与localpanner的对应关系呢?是否需要将车体坐标系以vehicle的形式发布出去?具体做法是什么?请教大家!!!
注:这里我已经将dirToVehicle设置为true,因为carla中的仿真车辆为类车阿克曼底盘
附上话题图与RVIZ图,以及打印的cmd_vel消息。

问题已解决,主要是要将点云参考坐标系设置为map,我的点云参考坐标系本身为车体坐标系,利用tf_listener在loaminterface中的点云回调函数,写一个点云坐标转换即可。同时我的flipRegisteredScan需要调整为false,不然坐标轴是反的,大家可以打印map/sensor和map/自己的lidar之间的tf变换,查看是不是坐标轴有错位的情况。


