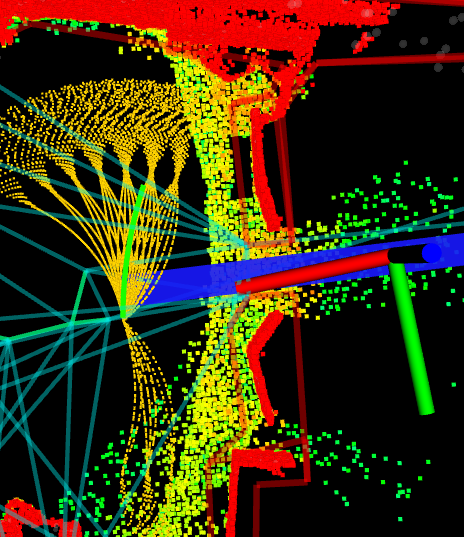
各位大佬好!我在做实验的过程中,遇到了小车无法通过狭窄路口的问题
图中全局规划的目标点在路口另一侧,小车在路口左侧,此时完全没有朝向目标点的free_path,小车此时就在路口前左右移动(遵循图中的free_path)
我之后又多次尝试,发现不是terrain_map的问题,也有terrain_map为绿色但是小车根本不能通过路口的情况
请问各位大佬我该怎么做,改修改参数还是更改哪里才能解决这个问题呢?
1,151
社区成员
453
社区内容
加载中
试试用AI创作助手写篇文章吧



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享