1,151
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
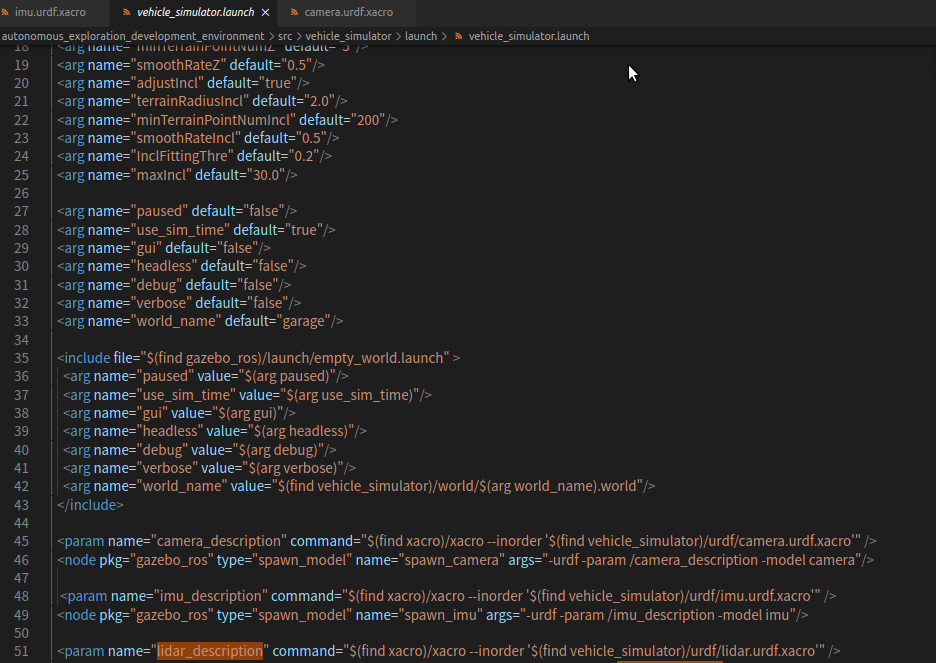
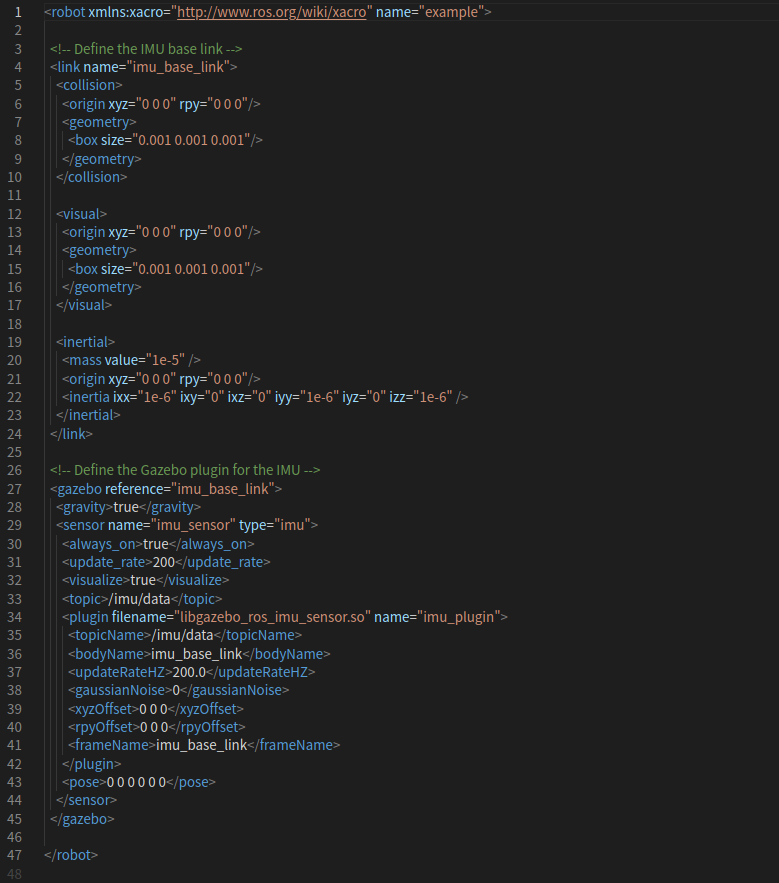
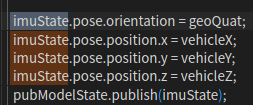
分享想问下社区有没有人使用过在提供的仿真场景里添加IMU 将采集的数据用于SLAM评估的 楼主使用的是LIO-SAM 在indoor场景下勉强能用,但部分情况下也是会漂移很大,定位飞掉,但是部署到campus环境里 一开始就飞了 这不应该阿 因为室内走廊算是退化场景都能勉强应付 为什么室外场景下 一下子就飞了呢 可能是我的IMU设置有问题? 但有问题应该不至于indoor场景下能定位不飞阿 有点搞不明白了 想有偿请教下懂gazebo 并且在该环境下部署过IMU仿真器 采数据建图的朋友。主要就是添加了个urdf文件 并且把它以类似的方式加入到了vehicle_simulator.launch中 同时在vehicleSimulator.cpp中添加了发布状态的代码 也不知道对不对 除此之外应该是没做别的修改了 想问下这里面是不是存在问题 因为之前也没有用过gazebo仿真