社区
Possumic正和微芯官方社区
问答专区
帖子详情
MRS6240 RadarAnalysisTool点击姿态点云后,shell指令显示下发成功,但不显示点云问题
dafdgffhgasf
2025-11-18 11:44:06
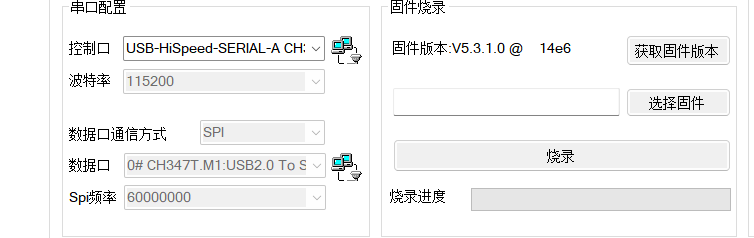
固件版本如下
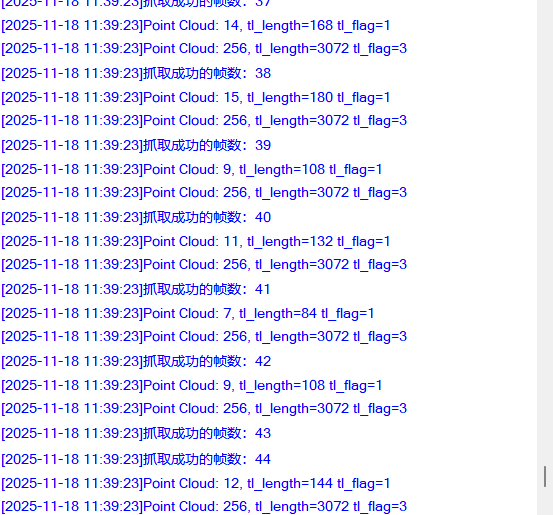
上位机接收数据解析结果如下
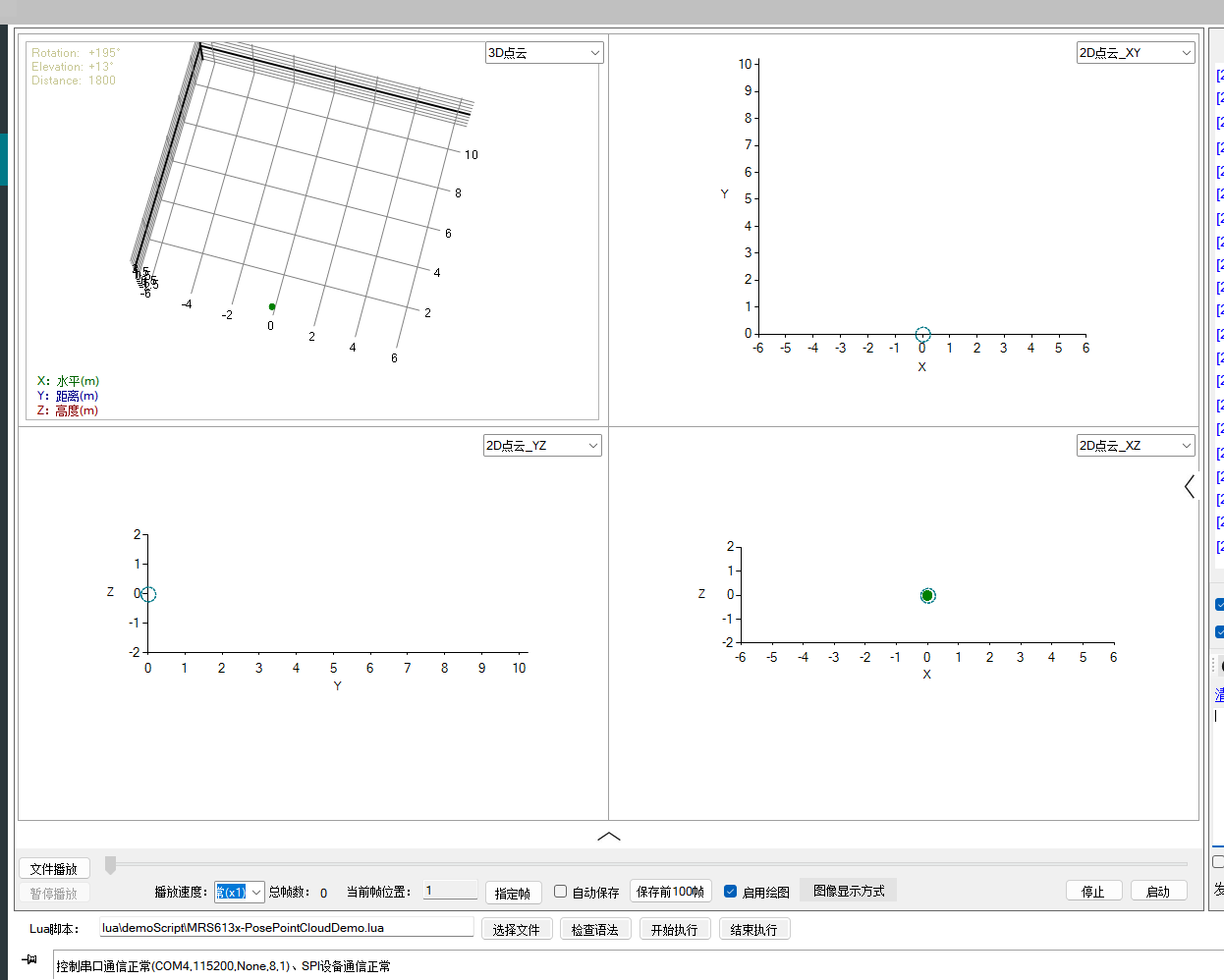
显示结果如下
请问为啥没有没有实时显示在界面上
...全文
82
1
打赏
收藏
MRS6240 RadarAnalysisTool点击姿态点云后,shell指令显示下发成功,但不显示点云问题
固件版本如下 上位机接收数据解析结果如下 显示结果如下 请问为啥没有没有实时显示在界面上
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
1 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
JerryJ_Li
2025-11-19
打赏
举报
回复
硬件平台没选择对,选择了6130了
【SICK LD-MRS400001激光雷达使用及
点云
解析(Matlab)】
SICK LD-MRS400001激光雷达 由于需要,最近学习使用了SICK公司的四线激光雷达,现将使用该过程中的一些经验分享给大家,欢迎大家一起学习交流。 链接里边是SOPAS软件设置LiDAR参数以及启动数据记录仪记录数据的过程,并给出了雷达扫描
点云
数据的解析过程。最后给出了一段matlab代码来解析
点云
数据。 链接:https://pan.baidu.com/s/1n4tvGSPWv32YL9AWl7r95w 提取码:iyxx 希望能够帮助到有需要的人。 ----月下星 ...
ARM 汇编
指令
MRS用法
ARM 汇编
指令
MRS用法
【ARM】MRS MSR
指令
00. 目录 文章目录00. 目录01. 状态操作
指令
概述02. MRS2.1
指令
的语法格式2.2
指令
示例03. MSR3.1
指令
的语法格式3.2 应用示例04. 综合应用4.1 使能 IRQ 中断4.2 禁止 IRQ 中断4.3 堆栈
指令
初始化05. 附录 01. 状态操作
指令
概述 ARM
指令
集提供了两条
指令
,可直接控制程序状态寄存器(Program State Register,PSR)。MRS
指令
用于把 CPSR 或 SPSR 的值传送到一个寄存器;MSR 与之相反,把一个寄存器的内容传送到
ARM汇编:MRS和MSR
指令
ARM汇编:MRS和MSR
指令
ARM中有两条
指令
用于在状态寄存器和通用寄存器之间传送数据。 一:下面先来说说状态寄存器 针对32位的ARM处理器,状态寄存器就是一个32位长的寄存器。每个位的含义如下图: 分成了4部分: 1,条件标志位 N(Negative), Z(Zero), C(Carry), V(Verflow)统称为条件标志位......
汇编
指令
msr_arm汇编—mrs,msr
操作系统:ubuntu10.04汇编语言:arm1、 MRS
指令
MRS
指令
的格式为:MRS{条件} 通用寄存器,程序状态寄存器(CPSR戒SPSR)MRS
指令
用亍将程序状态寄存器的内容传送到通用寄存器中。该
指令
一般用在以下两种情冴:Ⅰ.当需要改变程序状态寄存器的内容时,可用MRS将程序状态寄存器的内容读入通用寄存器,修改后再写回程序状态寄存器。Ⅱ.当在异常处理戒迕程切换时,需要保存程序状...
Possumic正和微芯官方社区
139
社区成员
237
社区内容
发帖
与我相关
我的任务
Possumic正和微芯官方社区
欢迎来到正和微芯官方社区,这里是毫米波雷达技术爱好者、开发者、技术专家以及行业领袖的聚集地。我们致力于提供一个开放、合作、创新的交流平台,让每一位成员都能在这里找到价值、获得启发、实现成长。
复制链接
扫一扫
分享
社区描述
欢迎来到正和微芯官方社区,这里是毫米波雷达技术爱好者、开发者、技术专家以及行业领袖的聚集地。我们致力于提供一个开放、合作、创新的交流平台,让每一位成员都能在这里找到价值、获得启发、实现成长。
硬件架构
射频工程
物联网
企业社区
广东省·珠海市
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享