

90
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享贵司的开发板+MRS262模组,熟悉上位机配置,因为是初学者,很多操作及专业名词不是很理解,遇到有以下诸多问题,所以麻烦请提供下技术支持:
基础操作设置 :平台选择 MRS262 ,通讯选择IIC默认通信并配置端口,点击连接 Connect 后上位机显示界面有红色数字距离显示并跳动。
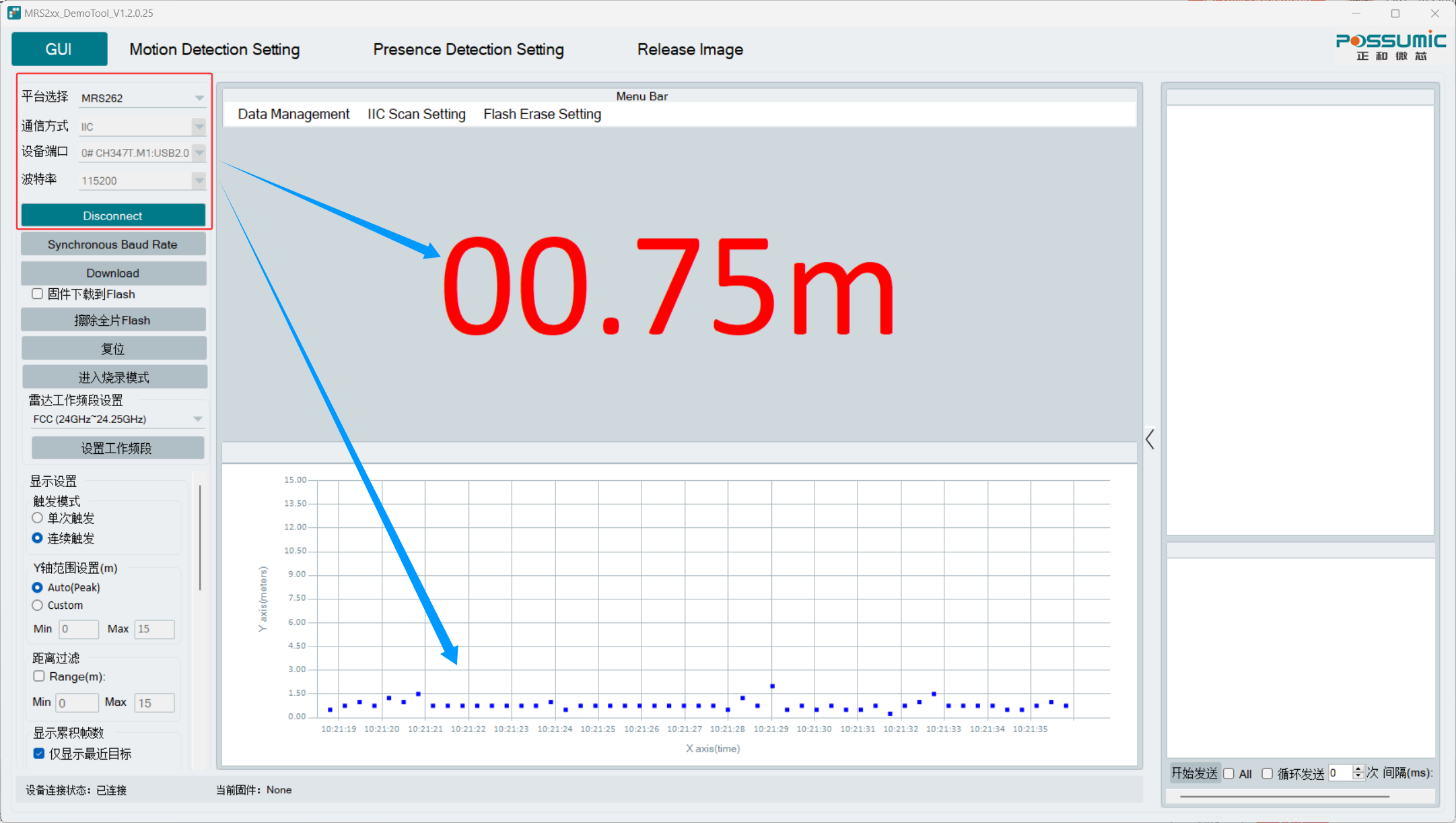
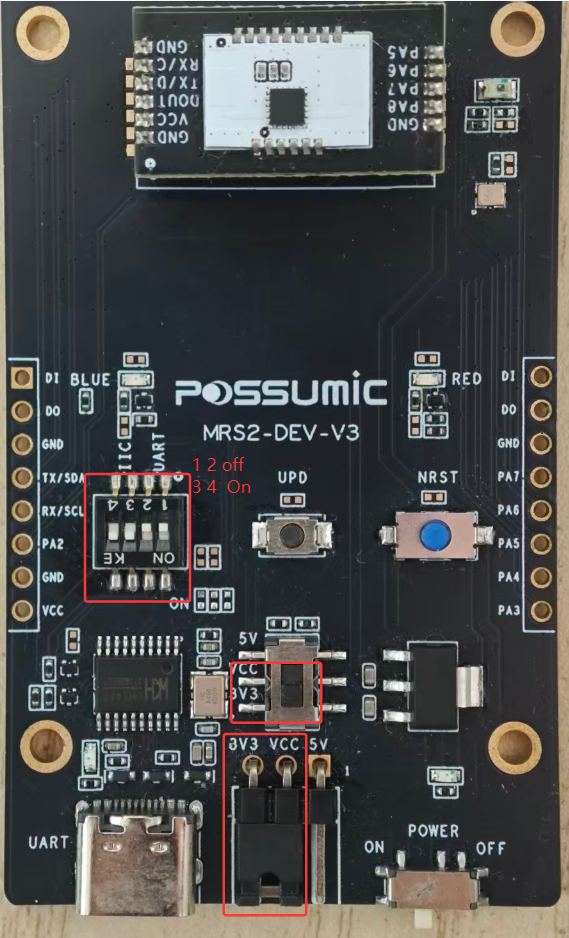
开发版配置如图:
问题1: 只做 此上述配置,无其他操作,能否确认程序已正常启动 上述上位机图片的0.75m是否就是感应到我的距离(环境内无其他人)?
问题2:基于上述基础操作后,我又点击 Motion Detection Setting ,然后点击 待机区段的 获取底噪 。等待许久后显示ACk回复超时,是否我操作有误?或者其他问题导致?正确的操作应是如何?在哪里查看这个底噪数据?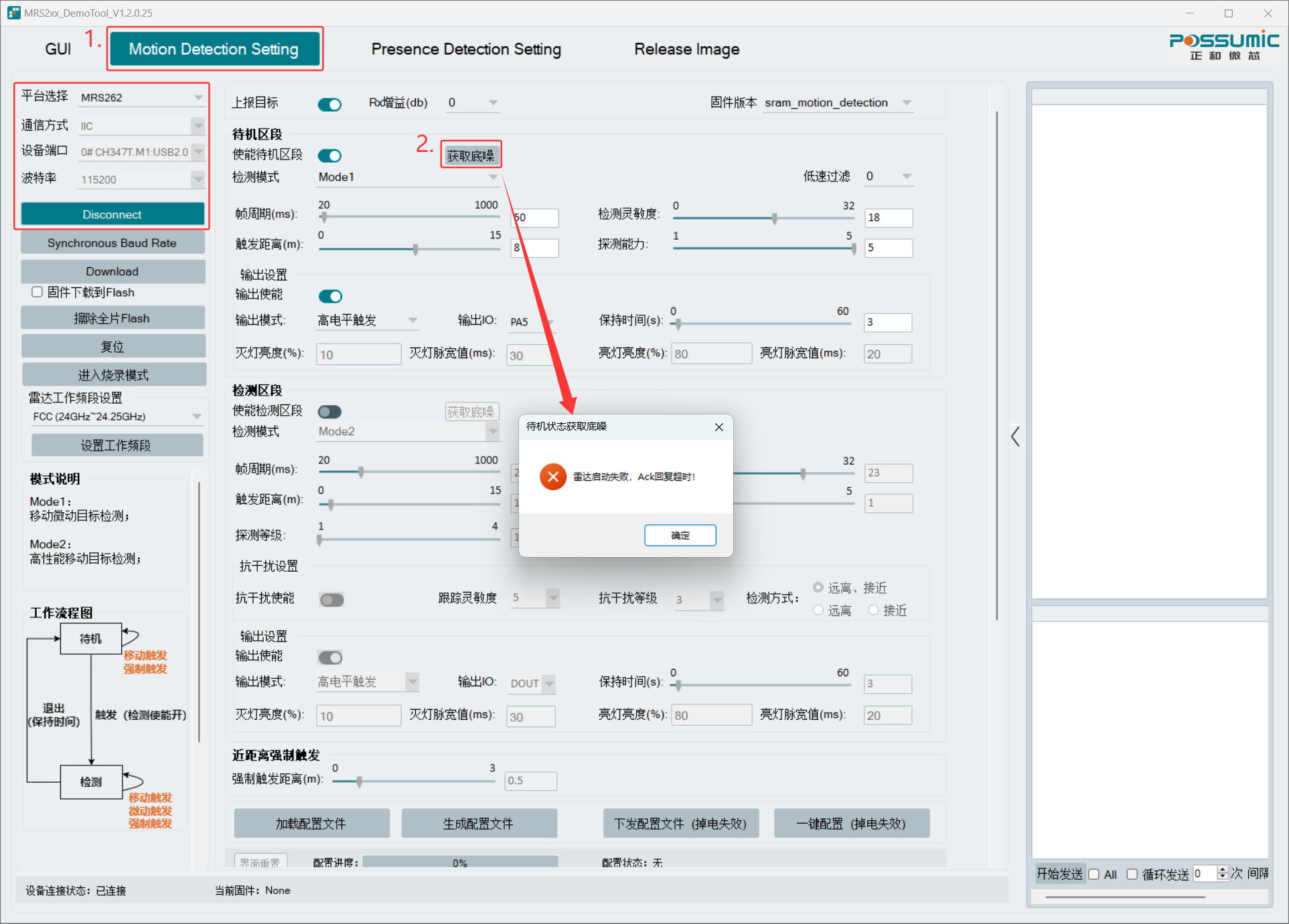
问题3:基于上述基础操作+问题2的操作后,先点击 进入休眠,然后点击 退出休眠 然后点击 启动 进行了以上三步操作后,有以下问题:
点击 进入休眠,上位机的显示界面 依旧显示红色数字距离并跳动。我个人理解的休眠是模块进入待机状态,但是待机为何还是有显示及感应距离的跳动? 我如何确定模块是休眠?
然后我又点击 退出休眠,上位机的显示界面 依旧也还是显示红色数字距离并跳动。并无其他变化,那我如何确定模块此时退出休眠?
然后我又点击 启动,上位机的显示界面 依旧也还是显示红色数字距离并跳动。右侧显示雷达启动成功并且显示进入休眠?我个人理解的启动 就是模块进入正常工作模式,又怎么会休眠?
而且我进行以上三次操作,除右侧任务栏有显示对应信息 上位机并未有其他变化,显示界面一直有感应距离的变化,那这几个对应的操作除字面意思,我应该如何验证这些操作是否在模式生效?

因为是小白,问题有点多且不理解,请详细告知操作及缘由,感激不尽。

问题一:从你的描述看,模组出厂时应该已经烧录了一个人存固件,所以模组上电即开始工作,当你点击connect,上位机就不停通过发查询命令获取目标数据。由于使用的人存固件,配置开起来时mode3+mode3,因此会很灵敏,你坐在雷达前,基本会一直保持着触发状态。关于“mode3+mode3”的解释、固件版本差异,基本的使用方法,你查看一下《MRS2xx_毫米波传感器Demo_指导手册.pdf》,里面有更详细说明。
问题二:由于工作于人存模式,且使用mode3+mode3,故在此页面下点击获取底噪是无效的,你可以换到“Presence Detection Setting”页面,选择mode3后,再点击“获取底噪”。
问题三:雷达周期性发毫米波探测环境,两次发波之间,系统会进入低功耗状态,这称为休眠,所以进入休眠只是让系统执行低功耗策略,而不影响雷达的探测。但对于MRS262,不支持低功耗策略,因此,这个设置是无效的。


