

86
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
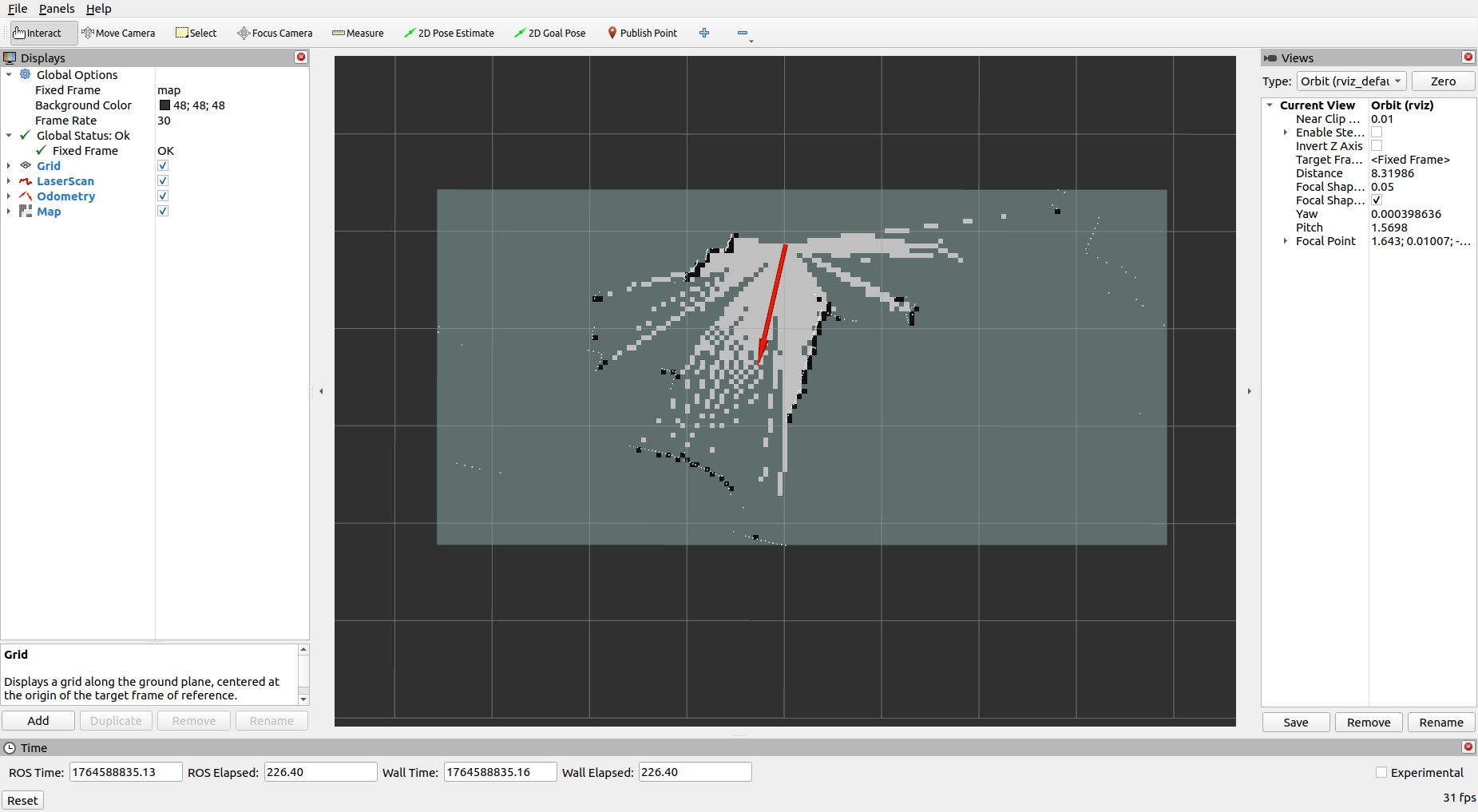
我的任务非常感谢华为教练团队的教程分享!我们在飞腾开发板上跑通了ROS2+SLAMTOOLBOX的教程示例,能够在PC上使用Rviz2看到雷达和里程计以及建图效果,具体如下图:
在开发过程中,现有如下问题想要咨询和探讨:
1. 在开发过程中,教程给出了使用hdc进行文件传输的过程,可以使用file send/recv 来进行PC和飞腾开发板之间文件互传,但是不论是OH还是OE开发环境均为终端的形式,开发过程非常麻烦。因此我们想到使用SSH进行链接,在本地PC使用VScode等IDE开发的方法,但是遇到了如下报错以及查询结果:

多次尝试后,没有找到什么好的解决办法,想问问官方在开发的过程中是否遇到过类似的问题,有没有什么好的解决办法能够直接使用IDE进行开发?
2.除此之外,我们查看了曦胧机器人本体指南中教程中封装的相机的SDK,发现只有函数调用可以接收和打印图像,无法实时查看相机视角图像,我们正在尝试如何在OE中使用ROS2话题通讯的方式获取和在PC上Rviz2中查看,想要知道是否有类似realsense-ros的ROS2的相机驱动可以在OE环境中直接编译,调用并发布话题?
3.对于《典型导航算法验证导航SLAM算法》,虽然跑通了,但是对于OH和OE两个环境还是比较迷惑,首先,对于OH环境中存在的/data/ros2_bundle,是否可以理解为这是类似于一个ros2_ws的ros2工作空间的文件?加载环境需要进入并source un_env.sh,后续可以在OH环境中启用雷达和位姿的ROS2节点。后续需要进入OE环境进行建图,是否是因为OE环境是一个完整的具有开发工具链的linux发型版?后续我们的主要开发环境是否应该集中在这个类似Docker的OERootFS环境中?
以上是我们这几天在对飞腾开发板OH和OE开发环境初步探索和教程尝试时碰到的问题,希望能够和各位同学老师进行探讨,并获得教练团队的答疑解惑!!

cool

1、OH暂不支持,OE上支持SSH, 建议先关闭SElinux进行尝试
2、使用 xlrobot.camera.CameraClient.get_camera_data获取图像数据,之后可以参考例程中发布雷达和位姿信息的node的源码(/data/chassis_controller/目录下),实现相机的topic发布。
3、1)ros2_bundle提供了python+ros2的环境,可以理解为在OE下/opt/ros/humble/目录对应的环境。2)是的,OE环境提供了完整的ros2环境依赖。3)OH和OE两个环境都可以进行开发,目前相关依赖在OE环境下更为完整,OH环境下还不支持直接编译运行,算力相关的开发建议在OE环境下进行。


86
社区成员
发帖 与我相关 我的任务

加载中
「智能机器人开发者大赛」官方平台,致力于为开发者和参赛选手提供赛事技术指导、行业标准解读及团队实战案例解析;聚焦智能机器人开发全栈技术闭环,助力开发者攻克技术瓶颈,促进软硬件集成、场景应用及商业化落地
试试用AI创作助手写篇文章吧