

91
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务经过排查,我们认为相机断连是由飞腾usb口供电不足引起的,当接上昇腾时,飞腾的pcie插口分走一部分功耗,导致usb口供电不足,从而导致相机不断重启,通过带有外部供电功能的usbhub可以解决这个问题。
解决办法分为软件与硬件两个部分:
软件修改:修改后端代码为,头部RGBD+左右手RGB(综合带宽与供电的考量)
在原有的OrbbecDevice.cpp和OrbbecDevice.hpp中加入config判断是否是头部舵机336L,并只为336L打开获取深度信息接口。
大家可以直接将我们修改好的OrbbecDevice.cpp和OrbbecDevice.hpp文件上传到/data/nvme/oe_rootfs/home/xlrobot-backend/src/camera中。接着在oe里重新编译一下cmake .. -DCAMERA_TYPE=orbbec -DARMS_TYPE=jaka。
(通过网盘分享的文件:OrbbecDevice.hpp等2个文件,链接:https://pan.baidu.com/s/1dJNlh79TLEJ0lpMgrEo3xA?pwd=994p 提取码: 994p)
硬件连接:使用带有外部供电功能的USBhub,给头部相机以及右臂相机供电。曦胧机器人上使用的USBhub就是这种类型的hub,如果不是,可以联系曦胧官方人员获取。
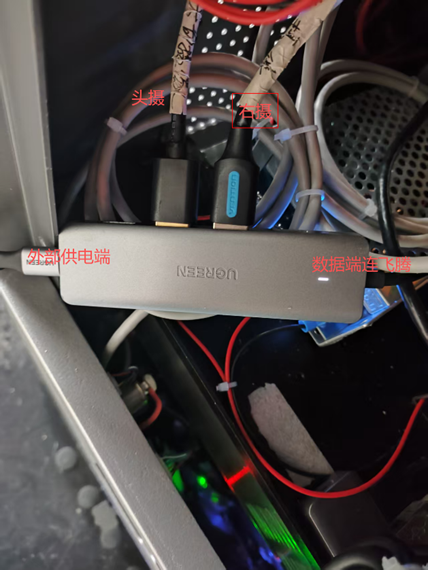
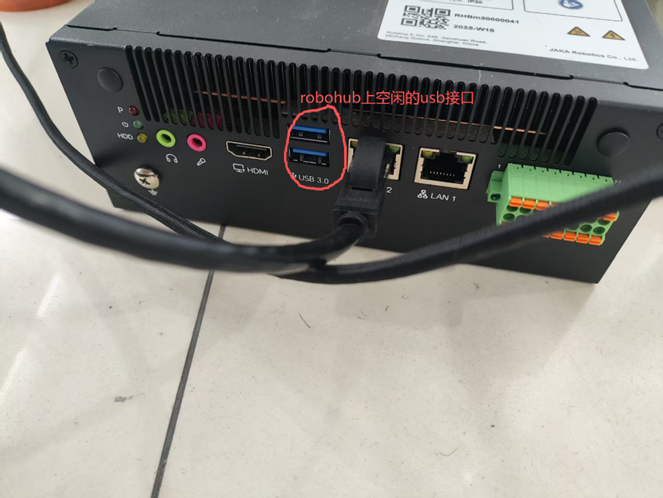
USBhub的数据端插在飞腾usb口上(为保证带宽足够,不将左臂相机也接到usbhub上),外部供电端插在JAKA robohub空闲的usb接口上,起到外部供电,保证相机功率稳定的作用。左臂相机则插在飞腾的usb口。其余usb设备保持不变。
通过以上方法设置,现在摄像头配置为头部RGBD相机,可以获取深度信息,左右相机则只获取彩色图像。如果大家在上述步骤中遇到了其它问题,欢迎发布在评论区,我们一起探讨一下。
91
社区成员
发帖 与我相关 我的任务


加载中
「智能机器人开发者大赛」官方平台,致力于为开发者和参赛选手提供赛事技术指导、行业标准解读及团队实战案例解析;聚焦智能机器人开发全栈技术闭环,助力开发者攻克技术瓶颈,促进软硬件集成、场景应用及商业化落地
试试用AI创作助手写篇文章吧